|
Software systems and computational methods
Reference:
Pritykin, F.N., Nefedov, D.I. (2018). Creating a knowledge base about past experience in the synthesis of arm movements of an android robot based on the use of the area of allowed configurations. Software systems and computational methods, 4, 60–67. https://doi.org/10.7256/2454-0714.2018.4.26638
Creating a knowledge base about past experience in the synthesis of arm movements of an android robot based on the use of the area of allowed configurations
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Prospekt Mira, 11, aud. Zv-516

|
pritykin@mail.ru
|
|
 |
Other publications by this author
|
|
|
Nefedov Dmitrii Igorevich
Graduate student, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Prospekt Mira, 11
|
|
3demon@bk.ru
|
|
|
Other publications by this author
|
|
|
DOI: 10.7256/2454-0714.2018.4.26638
Received:
19-06-2018
Published:
10-01-2019
Abstract:
The subject of research is the intellectual system for controlling the movement of the hand of an android robot in the presence of forbidden zones in the working space. The object of research is the automatic collision detection mechanism of the hand of an android robot, with obstacles at the level of virtual motion simulation. The authors examine in detail such aspects of the topic as determining the conditions of collisions based on the use of the area of allowed configurations and the synthesis of movements excluding the occurrence of dead ends in relation to the movement of the arm of an android robot. Particular attention is paid to the development of an analytical method for specifying the area of allowed configurations in the space of generalized coordinates in the presence of a previously known forbidden zone in the workspace. In this case, the space of generalized coordinates is given by the axes, in the direction of which they lay the angles defining the angular displacements in the rotational kinematic pairs. The research methodology is based on the calculation and analytical task of two-dimensional sections that define the area of allowed configurations. These sections are proposed to be specified using the sets of triangles. A special contribution of the authors to the study of the topic is the development of a generalized method for analytically specifying the area of allowed configurations. The obtained analytical dependences allow you to specify the area of allowed configurations, which is the knowledge base for intelligent control of the movement of the hand mechanism in a previously known external environment. The novelty of the research lies in the use of the area of allowed configurations in the synthesis of the trajectory in the space of generalized coordinates, which allows for the correction of the movement of the android robot arm in order to foresee and eliminate dead ends in the synthesis of movements along the velocity vector.
Keywords:
space of the generalized coordinates, area of the allowed configurations, the virtual model operation of movements, prohibited zones, knowledge base, intelligent robots, geometrical analysis, robot traffic control, manipulator mechanism, the generalized coordinates
Введение
В настоящее время ведутся работы, связанные с созданием андроидных роботов. В большинстве случаев данные роботы управляются человеком оператором. Вместе с тем так же ведутся работы связанные с созданием андроидных роботов оснащенных интеллектуальными системами управления. Данные системы позволяют обеспечить целенаправленное поведение и планирование действий приводящих в конечном итоге к выполнению основной двигательной задачи без участия человека оператора. Автономный робот – это техническая система, способная автономно перемещать объекты манипулирования при наличии препятствий в рабочем пространстве [1, 2, 6, 11].
Одной из наиболее распространенных аварийных ситуаций, возникающих при функционировании автономного робота, является его столкновение со средой [5, 6, 12]. Для обеспечения успешного функционирования автономных андроидных роботов в сложноорганизованных средах необходимо совершенствовать способы анализа положения механизма руки в известной и неизвестной окружающей среде. Поэтому существует необходимость в разработке модуля автоматического обнаружения столкновений с запретными зонами. Для сокращения времени расчетов, связанного с анализом положения механизма манипулятора в организованной среде в работах [7-9, 13] первоначально предлагается определять условие не пересечения траектории движения в пространстве обобщенных координат с границами области разрешенных конфигураций. В указанных работах предложен алгоритм построения движения механизма манипулятора, основанный на анализе положения точек пространства обобщенных координат, задающих разрешенные и запрещенные конфигурации. Все разрешенные конфигурации в пространстве обобщенных координат, могут быть изображены при этом n - мерным геометрическим объектом. Где n - определяет число обобщенных координат. Предложенный алгоритм позволяет предвидеть ситуации, в которые может прийти манипуляционная система, проделав определенное движение.
Постановка задачи исследования
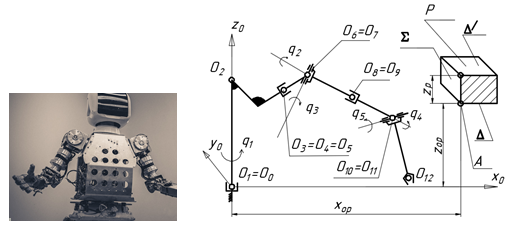
На рисунке 1аб изображены общий вид и кинематическая схема механизма руки андроидного робота AR-600 Е и положение запретной зоны P. Высота базовой точки А запретной зоны для рассматриваемого примера в системе координат Oо принята равной zop = 400 мм, минимальное безопасное удаление основания манипулятора от препятствия принято равным xор = 450 мм (см. рис. 1б).
а б
Рис. 1. Андроидный робот AR-600 Е: а – общий вид робота; б – кинематическая схема механизма руки и положение запретной зоны P
Высоту запретной зоны (стеллажа) определяет параметр zp=100мм. Геометрические параметры механизма руки, задают длины отрезков О1О2=300 мм , О2О3=120 мм, О3О6=100 мм, О6О8=80мм, О8О10=150 мм и О10О12=250 мм. Обобщенные координаты на рисунке обозначены qi. На рисунке точки O1-O12 определяют начала систем координат, используемых при задании модели кинематической цепи механизма руки андроидного робота. Для того чтобы определить область разрешенных конфигураций (которую обозначим Λ), с учетом положения запретной зоны P, построим совокупность двумерных сечений указанной области в четырехмерном пространстве обобщенных координат. Указанные сечения определяются фиксированными значениями обобщенных координат q2 и q3. Отдельные положения звеньев механизма руки будем исследовать при q1 = 0. Запретная зона Р, заданная двумя горизонтальными и одной профильной плоскостями уровня (см. рис. 2а), задает в пространстве обобщенных координат Lq некоторую область разрешенных конфигураций Λ. Исследуем сечения этой области, а так же определим аналитический метод нахождения принадлежности точек пространства обобщенных координат указанной области Λ. Способ вычисления точек сечений области разрешенных конфигураций Λ для создания базы знаний о прошлом опыте синтеза движений механизма манипулятора мобильного робота «Варан» ранее был предложен в работах [7-9].
Аналитический способ задания сечений области разрешенных конфигураций
Функционирование механизма манипулятора происходит в пределах ограниченной области W (четырехмерного пространства обобщенных координат Lq при q1 = 0). Область W, в общем случае заданная гиперпараллелепипедом, имеет такой вид, что для любого значения вектора q (q2, …, q5) выполняются неравенства:
 (1) (1)
где qimin и qimax – нижние и верхние предельные значения обобщенных координат. Для рассматриваемого примера при q1 = 0 значения параметра i удовлетворяют условиям 2 ≥ i ≥ 5. Значения qimin и qimax соответственно равны qimin (0о, -25о, -120о, -120о) и qimax (120о, 120о, 120о, 120о).
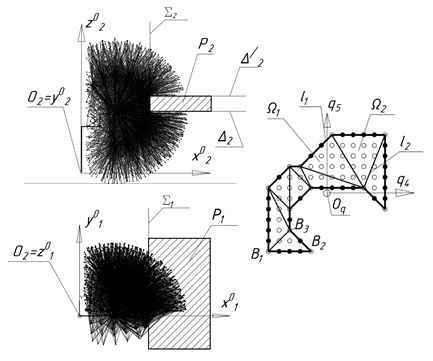
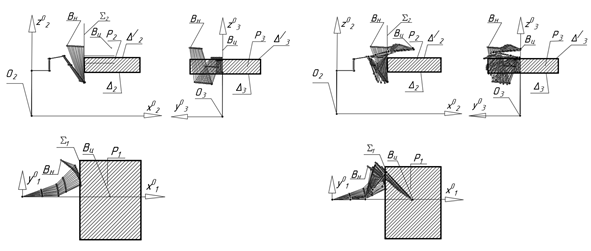
На рисунке 2а представлено множество разрешенных конфигураций, построенных с шагом Δqi = 20o при наличии запретной зоны Р. На рисунке запретная зона изображена на горизонтальной и фронтальной проекциях в виде четырехугольников Р1 и Р2. Условимся четырехмерную область разрешенных конфигураций Λ задавать совокупностью двумерных сечений. В связи со сложной и различной формой двумерных сечений области Λ андроидного робота при наличии запретной зоны P предложенная в работах [7-9] методика аналитического задания сечений не может быть применена. При шаге сетки Δqi = 20o в проведенных исследованиях изучена форма восьмидесяти четырех сечений. В связи с различной формой сечений разработан обобщенный способ задания их совокупностями треугольников l1 , l2 и т.п., которые будут задавать двумерные области Ω1 и Ω2 и т.д (см. рис. 2б). При этом область Λ получают на основе использования операций объединения теории множеств. На рисунке 2б представлено сечение области разрешенных конфигураций Λ соответственно при значении обобщенных координаты q2 = 40⁰, q3 = -100⁰, при этом xop = 450 мм., zop = 400 мм и zp = 100 мм. На рисунке 2б изображены треугольники, используемые для задания сечения области Λ.
а б
Рис. 2. Множество конфигураций, построенных при наличии запретной зоны P, заданной в виде прямоугольного параллелепипеда zop = 400 мм, xop = 450 мм, zp = 100 мм: а – изображения разрешенных конфигураций на двух плоскостях проекций; б – отображение разрешенных конфигураций точками сечения пространства обобщенных координат при q2=-20o и q3=-100о
Для разделения сечения на треугольники использован метод, предложенный в работе [14]. Области треугольника Ωi задаются полуплоскостями, определяемыми неравенствами [10]:
 (2) (2)
где m - число прямых ограничивающих треугольник области Ωi (для рассматриваемого примера 3 >= m >=1), l = 2 - параметр определяет размерность пространства сечений области разрешенных конфигураций при q1 = 0, q2 = const и q3 = const; d11, d12, …, dlm, b1, b2, …, bm – коэффициенты уравнений прямых, проходящих через вершины Bi треугольников li.
Схема алгоритма определения принадлежности точки А пространства обобщенных скоростей области Λ представлена на рис. 3.
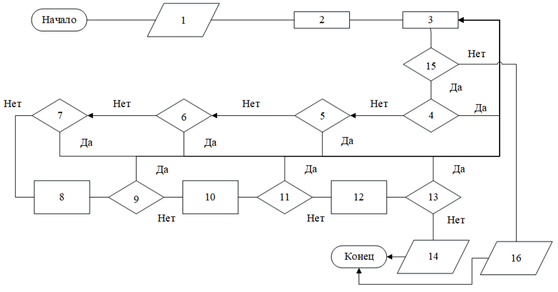
Рис. 3. – Схема алгоритма определения принадлежности точки конфигурационного пространства области Λ
На рисунке 3 приняты следующие обозначения:
1 - Ввод данных: n – количество треугольников для сечения A(q2S,q3S), где q2S ≈ q2A, q3S ≈ q3A, li(Bi1-3), где 1 ≤ i ≤ n, Bi1-3 – вершины треугольника li с координатами Bij(q4ij,q5ij), 1 ≤ j ≤ 3. A(q2A, q3A, q4A, q5A) – исходная точка принадлежность которой определяется к области Λ; 2 - Сброс счетчика треугольников i = 0; 3 - i = i + 1, выбор i-ого треугольника li(Bi1, Bi2, Bi3); 4 - Определение треугольников, все три вершины которых лежат выше прямой a  (рис. 4); 5 - Определение треугольников, все три вершины которых лежат ниже прямой a (рис. 4); 5 - Определение треугольников, все три вершины которых лежат ниже прямой a  6 - Определение треугольников, все три вершины которых лежат правее прямой 6 - Определение треугольников, все три вершины которых лежат правее прямой  7 - Определение треугольников, все три вершины которых лежат левее прямой 7 - Определение треугольников, все три вершины которых лежат левее прямой  8 - Расчет коэффициентов уравнения 1-ой стороны треугольника (2) 8 - Расчет коэффициентов уравнения 1-ой стороны треугольника (2)  9 – Лежат ли точка А и вершина В3 по разные стороны от прямой, содержащей 1-ю сторону 9 – Лежат ли точка А и вершина В3 по разные стороны от прямой, содержащей 1-ю сторону  10 - Расчет коэффициентов уравнения 2-ой стороны треугольника (2) 10 - Расчет коэффициентов уравнения 2-ой стороны треугольника (2)  ; 11 - Лежат ли точка А и вершина B1 по разные стороны от прямой, содержащей 2-ю сторону ; 11 - Лежат ли точка А и вершина B1 по разные стороны от прямой, содержащей 2-ю сторону  12 - Расчет коэффициентов уравнения 3-ой стороны треугольника 12 - Расчет коэффициентов уравнения 3-ой стороны треугольника 13 - Лежат ли точка А и вершина B2 по разные стороны от прямой, содержащей 3-ю сторону 13 - Лежат ли точка А и вершина B2 по разные стороны от прямой, содержащей 3-ю сторону 14 - Треугольник li является искомым; 15 - Проверка счетчика на завершенность i > n; 16 – точка не принадлежит ни одному из треугольников. 14 - Треугольник li является искомым; 15 - Проверка счетчика на завершенность i > n; 16 – точка не принадлежит ни одному из треугольников.
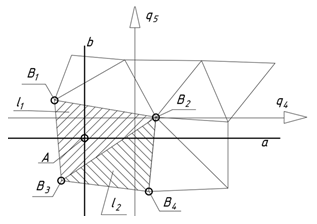
Рис. 4. – Определение треугольника li, внутри которого располагается точка А
Результаты виртуального моделирования движения руки андроидного робота
Совокупность сечений области разрешенных конфигураций и их аналитическое задание в виде множества треугольников определяется заранее на основе известного положения запретных зон (например, стеллажей) и геометрических и кинематических параметров механизма руки робота. Область Λ при этом задает базу знаний и модель окружающей рабочей обстановки. На основе использования области Λ появляется возможность создания алгоритма с целью прогноза развития событий при выполнении рукой робота двигательных задач. Алгоритм расчета траектории движения механизма в пространстве обобщенных координат с использованием построения движений по вектору скоростей и области Λ представлен в работе [7]. Прогноз возникновения различных ситуаций при движении в данной работе решается благодаря использованию масштаба отображения вектора приращений обобщенных координат. На рисунке 5а представлены результаты моделирования движения руки андроидного робота с возникновением тупиковой ситуации. При этом центр захвата смещается по отрезку прямой, которая соединяет начальную и конечную точки заданной траектории. Указанные точки на рис. 5аб обозначены Вн и Вц.
а б
Рис. 5. Моделирование движения руки андроидного робота: а – моделирование с возникновением тупиковой ситуации, б – моделирование с использованием масштаба отображения вектора приращений обобщенных координат и области Λ
На рис. 5б на основе использования области Λ и значения масштаба отображения вектора приращений обобщенных координат смоделировано движение на всем участке заданной траектории.
Заключение и выводы
Результаты построения сечений области разрешенных конфигураций андроидного робота с учетом положения стеллажа показали, что форма наружных контуров сечений может значительно отличаться друг от друга. Также сечения могут состоять из двух и более замкнутых контуров. Для определения принадлежности точек пространства обобщенных координат сечениям области разрешенных конфигураций, наиболее рационально задавать указанные сечения множествами треугольников.
Разработка алгоритмов принятия решений интеллектуальной ситемой управления робота с целью изменения направлений движения руки андроидного робота по отношению к препятствиям позволяет создать модуль виртуального моделирования для поиска решений поставленных двигательных задач. Для приобретения и правильного представления знаний о возможных положениях руки с учетом заранее заданной запретной зоны использована область разрешенных конфигураций. Данная область позволяет представлять знания о положении механизма руки с учетом запртетной зоны в такой форме, которая понятна интеллектуальной системе. При этом формализация знаний на основе использования указанной области позволяет создание модели внешней среды с описанием множества ситуаций. Результаты исследований могут быть использованы при разработке интеллектуальных систем управления автономно функционирующих роботов, в частности при создании баз знаний о прошлом опыте синтеза движений.
References
1. Afonin, V. L. Intellektual'nye robototekhnicheskie sistemy / V. L. Afonin, V. A. Makushkin. – M. : Internet-universitet informatsionnykh tekhnologii, 2010. – 208 s.
2. Grigor'ev, S. N. Sovremennoe sostoyanie i perspektivy razvitiya promyshlennoi robototekhniki / S. N. Grigor'ev, A. G. Andreev, S. P. Ivanovskii // Mekhatronika, avtomatizatsiya, upravlenie. - 2013. - № 1.- S. 30 - 34.
3. Kobrinskii, A. A. Manipulyatsionnye sistemy robotov / A. A. Kobrinskii, A. E. Kobrinskii. – M. : Nauka. 1985. – 343 c.
4. Korendyasev, A. I. Manipulyatsionnye sistemy robotov / A. I. Korendyasev, B. L. Salamandra, L. I. Tyves. – M. : Mashinostroenie, 1989. – 472 s.
5. Lopatin, P.K., Issledovanie dostizhimosti tselevykh sostoyanii v neizvestnoi staticheskoi srede / P.K. Lopatin // Mekhatronika, avtomatizatsiya, upravlenie.- 2009. - №4.- S. 2 - 6.
6. Lokhin, V. M. Povyshenie adaptivnykh svoistv avtonomnykh robotov na baze intellektual'nykh tekhnologii / V. M. Lokhin, S. V. Man'ko, M. P Romanov. // Ekstremal'naya robototekhnika. – 2015. – № 1 (1). – S. 59 – 67.
7. Pritykin, F. N. Geometricheskii analiz tekushchikh situatsii, kharakterizuyushchikh polozhenie manipulyatora i okruzhayushchei sredy na osnove ispol'zovaniya oblasti razreshennykh konfiguratsii [Elektronnyi resurs] / F. N. Pritykin , V. G. Khomchenko, D. I. Nefedov // Programmnye sistemy i vychislitel'nye metody. – 2017. – № 2. – Rezhim dostupa: http://e-notabene.ru/ppsvm/article_22685.html
8. Pritykin, F. N. Issledovanie poverkhnostei, zadayushchikh granitsy oblasti razreshennykh konfiguratsii mekhanizma mobil'nogo manipulyatora pri nalichii zapretnykh zon / F. N. Pritykin, D. I. Nefedov // Mekhatronika, avtomatizatsiya, upravlenie. – 2016. – № 6, – t. 17. – S. 404 – 413.
9. Pritykin, F.N. Issledovanie vliyaniya zapretnykh zon na formu i polozhenie oblasti razreshennykh konfiguratsii mekhanizma manipulyatora / F.N. Pritykin, D.I. Nefedov // Omskii nauchnyi vestnik. - 2017. - T.1, № 1.- S. 19 - 24.
10. Rvachev, V. L. Teoriya R-funktsii i nekotorye ee prilozheniya / V. L. Rvachev. – Kiev, 1982. – 252 s.
11. Yusupov, R. M. Intellektualizatsiya protsessov upravleniya i navigatsii robototekhnicheskikh sistem / R. M. Yusupov, A. V. Timofeev // Ekstremal'naya robototekhnika. – 2014. – T. 1, № 1. – S. 16 – 21.
12. Whitney, D. E. The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators / D. E. Whitney // J. Dyn. Sys., Meas., Control. – 2010. – № 94 (4). – P. 303–309.
13. Pritykin F.N. Computation of manipulator mechanism path in joint coordinate space with working range forbidden regions / F.N.Pritykin, D.I. Nefedov // Dynamics of Systems, Mechanisms and Machines (Dynamics), 2016, 15-17 Nov. 2016, DOI: 10.1109/Dynamics.2016.7819065
14. Eberly, D. Triangulation by Ear Clipping. / David Eberly // Geometric Tools, Redmond WA 98052
|







