|
Software systems and computational methods
Reference:
Sergeev , D.A., Rodionov, D.G., Polyakov , P.A., Golikov , G.I., Starchenkova , O.D., Dmitriev , N.D., Konnikov , E.A. (2025). Intelligent Monitoring and Route Adaptation System for Drones based on Neural Network Risk Analysis. Software systems and computational methods, 1, 55–70. . https://doi.org/10.7256/2454-0714.2025.1.73255
Intelligent Monitoring and Route Adaptation System for Drones based on Neural Network Risk Analysis
Sergeev Dmitry Anatolyevich
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk St., 50

|
sergeev_da@spbstu.ru
|
|
 |
Rodionov Dmitry Grigoryevich
ORCID: 0000-0002-1254-0464
Doctor of Economics
Professor; Director at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
drodionov@spbstu.ru
|
|
|
Other publications by this author
|
|
Polyakov Prohor Aleksandrovich
Researcher at the Laboratory "Polytech-Invest"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk St., 50
|
|
prohor@polyakov-box.ru
|
|
|
Golikov Gleb Igorevich
ORCID: 0009-0008-0538-0942
Researcher at the Laboratory "Polytech-Invest"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
golikov.23@mail.ru
|
|
|
Starchenkova Olesya Dmitrievna
ORCID: 0009-0009-1168-2362
Specialist at the Laboratory "Modeling and Digitalization of Socio-Economic Systems"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
starchenkova_od@spbstu.ru
|
|
|
Dmitriev Nikolai Dmitrievich
ORCID: 0000-0003-0282-1163
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
Head of the Laboratory 'Modeling and Digitalization of Socio-Economic Systems'; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
dmitriev_nd@spbstu.ru
|
|
|
Other publications by this author
|
|
|
Konnikov Evgenii Aleksandrovich
ORCID: 0000-0002-4685-8569
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
Head of the Laboratory «Polytech-Invest»; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
konnikov_ea@spbstu.ru
|
|
|
|
DOI: 10.7256/2454-0714.2025.1.73255
EDN: UZVYID
Received:
04-02-2025
Published:
03-04-2025
Abstract:
The study examines an intelligent monitoring and route adaptation system for unmanned aerial vehicles (Drones) based on neural network risk analysis. The research considers autonomous navigation algorithms that enable environmental analysis and real-time trajectory correction in response to potential threats. The possibilities of applying computer vision, neural network algorithms, data preprocessing methods, object detection, semantic segmentation, trajectory planning algorithms, predictive control, and adaptive route optimization are assessed for identifying obstacles, moving objects, and restricted flight zones. The role of intelligent control systems for drones is analyzed, along with their impact on enhancing autonomy, resilience, and operational efficiency in dynamically changing environments. The proposed solutions are aimed at risk mitigation associated with emergency situations through the implementation of adaptive flight control strategies. The study employs methods of systems analysis, computer vision, and machine learning, including convolutional neural networks, image preprocessing algorithms, data filtering and segmentation, as well as sensor data analysis. The effectiveness assessment is carried out through trajectory modeling, testing of threat identification algorithms, and analysis of UAV route stability parameters. The scientific novelty lies in the development of an integrated system for intelligent UAV route correction based on neural network object classification methods and adaptive trajectory planning algorithms. Mechanisms for predictive risk analysis have been developed, ensuring automatic route adjustment upon detecting obstacles, adverse weather conditions, and restricted-access zones. The proposed control architecture integrates computer vision technologies, data stream analysis, and automated decision-making while using dynamic routing methods, real-time flight correction algorithms, and collision avoidance strategies. This approach enhances the level of UAV autonomy. The developed intelligent navigation algorithms can be implemented in modern autonomous UAV control systems, enabling adaptation to dynamic conditions and increasing the efficiency of task execution across various domains, including defense and industrial applications.
Keywords:
Decision-Making System, Intelligent Control, Neural Network Analysis, Computer Vision, Deep Learning, Autonomous Navigation, Threat Prevention, Route Optimization, Unmanned Aerial Vehicles, Adaptive Algorithms
This article is automatically translated.
Introduction. With the development of unmanned aerial vehicle (UAV) technologies, there is a growing need for intelligent control systems capable of effectively adapting a route to real threats and environmental changes [1]. One of the promising areas is the use of neural network technologies to analyze risk objects and make operational decisions about route adjustments. In various fields, including transport, industry, logistics, and defense, the complexity of tasks that require autonomous or semi-autonomous management is increasing [2]. In such conditions, traditional management systems are no longer always able to effectively cope with dynamic environmental changes. This is due to several key factors: an increase in data volume, complex and dynamic operating conditions, increased security requirements, demand for resource optimization, and the need for autonomous operation [3]. According to the level of intelligence, the following intelligent control systems are distinguished [4]: · Expert systems that use pre-defined rules and knowledge bases to complete tasks. · Trainable systems in which machine learning improves work efficiency based on new data. · Artificial intelligence systems are fully autonomous solutions capable of analyzing data, predicting and making decisions without human intervention. The purpose of the article is to create an artificial intelligence device that works in real time.: 1. Analyzes the environment using data from cameras, sensors, and external sources. 2. Identifies potential threats (risk objects) such as weather conditions, obstacles, restricted flight zones, and moving objects. 3. Modifies the route of the UAV to ensure safety and improve the efficiency of the task. An example of successful fulfillment of tasks in this direction are the inventions of Russian scientists – new models of drones "Microbe" and "Killer Whale" with artificial intelligence functions. AI elements allow the drone to independently accompany and hit the target [5]: 1. High degree of autonomy. Artificial intelligence makes it possible for drones to function without direct operator control, which increases their effectiveness in difficult combat conditions. 2. The ability to adapt to a changing environment in real time. It uses cameras and thermal imagers to build terrain maps and analyze objects. 3. Recognition of friendly and enemy targets. 4. The ability to work as part of a swarm of drones with the distribution of tasks between the devices. The peculiarity of such drones is their consistency, being part of a single concept of using unmanned systems, they interact within the framework of an integrated strategy. Kasatka analyzes target data using AI, makes strategic decisions, and coordinates the actions of the Microbes [6]. They, in turn, perform tactical tasks such as gathering intelligence, delivering pinpoint strikes, or distracting the enemy's attention. The use of drones within a single intelligence support system ensures the integration of data from various sensors and platforms, forming a holistic picture of the operational situation [7]. This aspect leads the authors to the key term "neural network analysis of risk objects" – the use of artificial intelligence and deep learning technologies to identify, classify and predict potential threats in various environments [8]. This approach is used to analyze data coming from sensors, cameras, radars, and other sources, and allows you to automate the risk assessment process, which is especially important in dynamic and complex environments such as military operations. Thanks to the use of data from drones, satellite imagery, and ground-based sensors, neural networks can quickly identify priority targets, predict their behavior, and suggest optimal response tactics. Such technologies can be used to optimize troop or equipment routes, minimizing the risks of encountering hazards such as artillery attacks or minefield zones [9]. Realization. In the process of analyzing the advantages of the implementation, a set of advantages of using unmanned aerial vehicles for information transmission was highlighted. Among these, one can distinguish [10]: 1. Increasing the efficiency of the deployment of communication networks. Using UAVs as mobile repeaters can significantly speed up the process of deploying and reconfiguring communication channels in a new location. In case of failure or insufficient bandwidth of regular communication nodes, UAVs can quickly replace or supplement the existing infrastructure, ensuring continuity of command and control of combat units [11]. 2. Flexible scalability and redundancy. Due to the ability to quickly change the number and type of unmanned aerial vehicles, as well as their distribution in the area of operation, such complexes allow dynamically scaling the network for specific tasks. When one of the network links is threatened with failure (for example, loss or technical malfunction of one drone), other UAVs are able to take over its functions, providing a high level of fault tolerance [12].
3. Extended range and continuity of communication. UAVs can operate beyond the line of sight of ground nodes, increasing the range and coverage of the network. This is especially important in situations where traditional communication stations are subject to severe interference or are in unfavorable conditions (mountainous terrain, forests, infrastructural destruction, etc.) [13]. 4. Effective counteraction to electronic warfare. The high mobility and speed of UAV relocation complicates their detection and targeted suppression by electronic warfare [14]. 5. Reducing the load on satellite channels. With high-intensity data exchange (for example, during a large operation), satellite channels may be overloaded or limited by interference and external factors. UAVs acting as alternative or duplicate communication channels unload satellite networks and increase the overall bandwidth of an integrated communication system [15]. 6. Increased privacy and difficulty in detection. Due to the ability to change flight altitude, routes, and range, drones can create temporary communication channels that are more difficult for the enemy to track. Provided that operational and intelligence data is transmitted only through direct physical contact with the drone via USB channels, this solution significantly complicates attempts to intercept information [16]. Therefore, from the point of view of the technical implementation of the drone, in accordance with the outlined theoretical advantages, it is critically important to develop a system for autonomous correction of the trajectory of the UAV, which is achieved through the consistent application of the following software and technical methods [17]: 1. A real-time video recording system for the UAV environment, implemented by integrating photo/video equipment into a complex of additional mounted contour drone equipment [18]. 2. A machine vision system implemented by neural network software methods, which, in turn, in order to ensure the autonomy of operational work, should be a solution integrated into the UAV [19]. 3. A route correction system that affects the local short-term trajectory of the UAV [20]. The integrated technical implementation of such solutions is achieved through the development of a hinged contour. A basic graphical electronic circuit is shown in Figure 1. 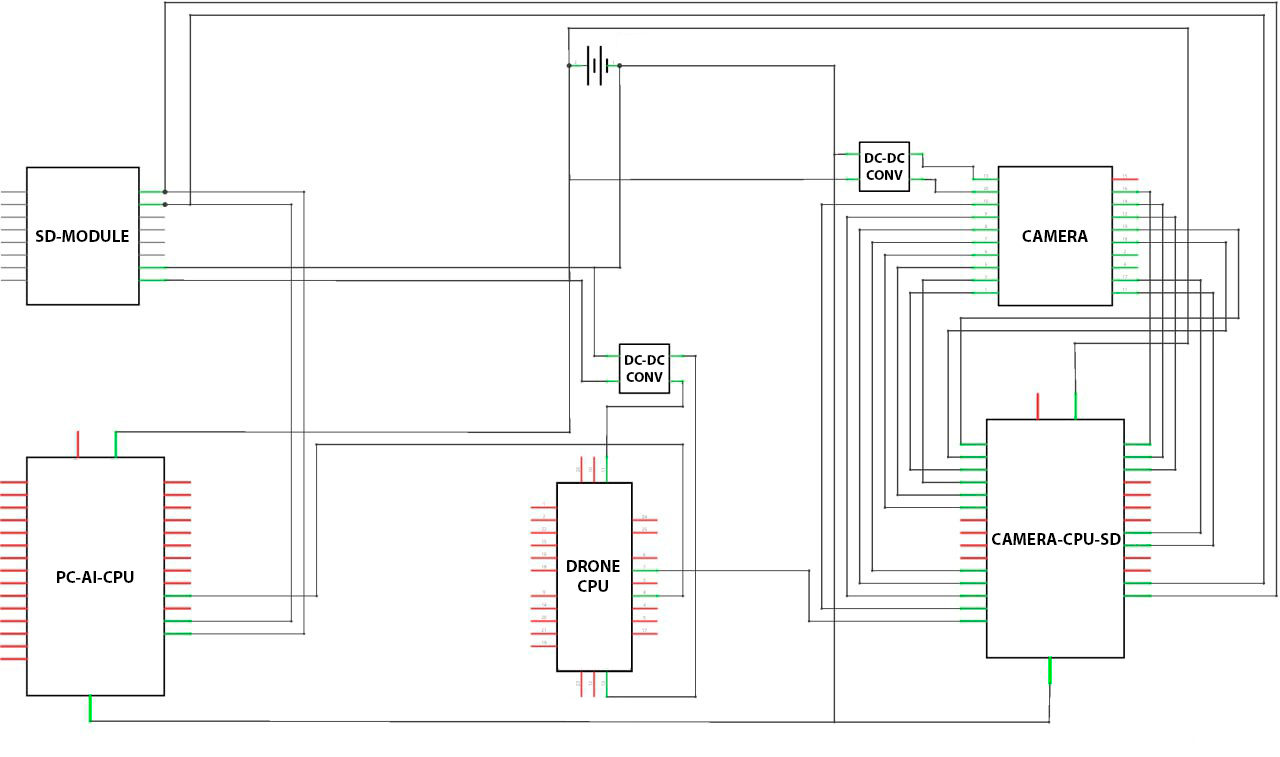
Figure 1 – Schematic graphic electronic diagram of a mounted contour for real-time route correction The elements shown in Figure 1 have the following technical and functional description, discussed in Table 1. The logic of their operation is presented in Table 2. Table 1 – Elements in the contour of the system and their description | Contour component | Technical and functional description | | The U2 camera | It takes pictures in real time, which are recorded on the SD module. The functionally large number of connections is due to the need to supply power, connect parallel data transmission, and synchronize the recording frequency and transmission time. | | CAMERA–CPU–SD Raspberry Pi | Controls the camera, adjusts its settings, and performs preprocessing of the images. | | PC–AI–CPU Raspberry Pi |
It uses the obtained images for analysis using a neural network, identifying potential threats to the drone and completing the task. If a threat is detected, it provides an updated short-term flight path to the ESP MC. | | DRONE–CPU ESP8266 | The drone's onboard microcontroller integrated with ESC. Accepts adjusted flight paths from the PC-AI-CPU. | | SD-MODULE | The SD card storage module, which records camera frames and reads images from the Raspberry Pi PC–AI CPU. | Table 2 – Logic of operation of the presented components as part of a single hardware circuit | Step | Description | | 1. Data collection | The camera captures images with a preset time interval and saves them to the SD module. | | 2. Data analysis | Raspberry Pi uses a neural network to analyze the presence of threats to the drone in the images. When threats are detected, a control signal is generated with the formation of an updated short-term flight path of the drone. | | 3. Responding to threats | The ESP8266 is the drone's main flight microcontroller integrated with ESC. If necessary, it adjusts the trajectory of the movement, accepting the updated parameters. | | 4. Management and configuration | It is possible to adjust camera settings and update image processing algorithms on the second Raspberry Pi. | Testing methodology. An experimental test was conducted to assess the operability of an autonomous unmanned aerial vehicle in the absence of a GPS signal. The system included a neural network threat analysis module. Scenarios simulating real-world operating conditions were developed for testing. The tests were carried out both in a simulated environment and in an open area where the GPS signal was intentionally turned off or jammed. A quadcopter weighing about 1.5 kg, equipped with an on-board computer for processing neural network algorithms, was used as a test device. The navigation system included inertial sensors, a barometer and a monocular camera.
The flights were carried out on a pre-determined route with a length of approximately ~ 500 m and a return to the starting point. During the experiments, alternative navigation based on odometer data and computer vision algorithms was used. Artificial threats were introduced to assess the correctness of the system. These included sudden obstacles and restricted areas, which the device had to identify using a trained neural network. The architecture of the model included a convolutional neural network focused on the classification of typical threats. If danger was detected, the drone had to quickly adjust its trajectory. To assess the effectiveness, the system's response to various environmental factors was analyzed. During the tests, the: the wind speed (in the range of 0-8 m/s), the density of obstacles (rare or numerous objects), as well as the threshold sensitivity of the threat detector. Each combination of conditions was tested on at least 10 repeat flights. Quantitative parameters reflecting the success of the tasks were recorded. During the testing, the following parameters were analyzed: the proportion of completed missions; the trajectory of the vehicle; the time interval between the detection of a threat and the start of an evasive maneuver; the number of false alarms of the detector; the accuracy of obstacle classification. The methodological approach made it possible to collect statistically significant data and quantify the functioning of the system under reproducible conditions. Experimental results. The graph (Fig. 2) shows variable factors along the X-axis, such as wind speed (in m/s) and obstacle density (in points). The Y-axis shows a generalized criterion of flight efficiency, for example, the percentage of successfully completed route or the probability of successful completion of the mission. Data analysis shows that as the complexity of the conditions increases, flight success decreases monotonously. An increase in wind speed above 5 m/s leads to an increase in the stabilization error and a decrease in the number of successfully completed flights. Wind exposure up to 2-3 m/s has practically no effect on the result. A similar trend can be observed when the density of obstacles changes. As the number of objects in the flight area increases, the flight time and the number of evasive maneuvers increase. After the threshold of 5 obstacles per 100 m of the path, there is a sharp decrease in mission success. In conditions of extreme route congestion, the efficiency indicator tends to zero. The complexity of the environment has the greatest impact on the success of tasks. With a high density of obstacles and strong winds, the system reaches maximum stability values. Adaptation of navigation methods is required to improve the efficiency of algorithms.
Figure 2 – Graph of the dependence of the flight success rate on several environmental factors demonstrates the sensitivity of the system to external influences. Figure 3 shows a histogram of the probability density of flight success, reflecting the statistical distribution of outcomes across the totality of all tests performed. The value of the calculated flight success rate is shifted along the horizontal axis, and the density (frequency) of observations of this value is shifted along the vertical axis. The distribution has a pronounced two-modal form. The main peak is concentrated in the area of positive values of the indicator (from 0 to 1), which corresponds to successful flights. A smaller peak is observed in the area of negative values, which indicates frequent system failures.
Figure 3 – The histogram of the probability distribution of flight success reflects the statistical distribution of outcomes across the totality of all tests performed. Data analysis shows that for most launches, the probability of successful completion of the mission is in the range of 0.7–0.9, which confirms the reliability of the system under normal conditions. However, a group of tests was recorded in which the system was unable to complete the mission. Negative values on the X scale of the histogram (Figure 3) correspond to a complete flight failure. In these cases, the drone did not reach the end point or was forced to make an emergency landing. The area under the left part of the histogram reflects the frequency of failures. During the experiments, about 15% of launches ended in failure, while 85% of the tests resulted in successful or partially successful completion of the flight mission. An analysis of the results shows that the probability of a favorable outcome remains high in most cases. However, there remains a risk of system failure, which must be taken into account when further optimizing algorithms and hardware configuration. Critical analysis. The results obtained confirm the operability of the proposed system, however, they reveal a number of limitations of the current implementation. Firstly, the dependence of efficiency on environmental conditions has been recorded. With a combination of complex factors, the system is approaching the limit of its capabilities, which indicates that the model is not robust enough in extreme cases. This vulnerability to unusual situations is typical for autonomous navigation. Dynamic and complex conditions create significant challenges for an unmanned aerial vehicle [21]. Secondly, neural network threat analysis demonstrates high accuracy in the average case, but it is not completely error-free. False positives were recorded when safe objects were mistakenly classified as threats, as well as missing real obstacles. Such mistakes led either to overly cautious maneuvers or to a delayed reaction to the threat. Similar effects have been noted in other studies. For example, it has been shown that even with an overall classification accuracy of about ~90%, some algorithms exhibit up to 40% false alarms in complex scenes [22]. During the tests, false alarms accounted for approximately ~8% of threat detections. This result indicates the need for further optimization of filtering algorithms. An additional limitation is the accumulation of navigation errors in the absence of GPS. The use of visual odometry and inertial sensors made it possible to reduce coordinate drift, but the error continued to accumulate. At short distances, this deviation is insignificant, but during a long flight without external landmarks, significant deviations are possible, which are not compensated for in the current implementation. In addition, an increase in the computational load was revealed with the active use of the neural network module. During the experiments, an increase in the average response time of the system by about 20% was recorded. Limited on-board computer resources and power consumption can create problems for real-time data processing. Finally, the tests were conducted under predominantly controlled conditions. Scenarios of deliberate electronic suppression of communication channels, as well as the emergence of fundamentally new types of threats that are absent from the neural network training sample, have not been investigated. Potential optimization directions include the expansion and diversity of training data for the neural network, which will reduce the likelihood of classification errors. A promising solution is the introduction of navigation self-correction mechanisms, for example, periodic position calibration using ground landmarks or alternative sensors. Significant improvements in computational efficiency can be achieved by optimizing the hardware and software, which reduces data processing delays. Additional ways to increase resilience include the use of ensemble threat detection methods combining several algorithms, as well as the use of adaptive trajectory planning strategies based on the degree of confidence of the neural network detector. Quantitative metrics and comparison with existing approaches. For an objective assessment, quantitative metrics were calculated, which were then compared with the characteristics of alternative solutions. The average flight success rate in the absence of GPS was 85-88% (the proportion of completed missions without an accident). This result is slightly lower than that of similar systems operating with a stable GPS signal. For example, in one recent simulation study, an advanced deep learning-based method demonstrated more than 90% of successful flights in a suppressed GPS scenario. When using the exact coordinates of the target, this indicator reached 95% [21]. The average result of the current system (~88%) is close to this level, which confirms its competitiveness. When compared with traditional navigation algorithms without GPS (for example, inertial odometry with responding to obstacles according to predefined rules), a clear improvement was recorded. During the experiments, a simplified version of the system without a neural network module demonstrated a success rate of about ~70%. The lower rates are attributed to the high number of accidents due to late detection of obstacles. One of the significant performance parameters is the route adaptation time when a threat occurs. In the presented solution, the average time interval between the moment of detection of an obstacle and the beginning of an evasive maneuver was about 1.3 seconds. For comparison, the system without intelligent threat analysis showed a delay of up to 2-3 seconds. This difference is explained by the proactive nature of the neural network detector, which detects obstacles earlier and thereby reduces the time needed to rebuild the trajectory.
The accuracy of threat classification in the proposed solution has reached 92% (in terms of the totality of types of objects and situations). This indicator is quite high, but it is inferior to highly specialized systems. For example, in the tasks of cyber security of drones, the possibility of achieving accuracy of the order of ~99.99% on test datasets is recorded [23]. In real flight conditions with physical threats, achieving such high accuracy is difficult, so 92% is a satisfactory indicator. The neural network detector demonstrates a balance between accuracy and the breadth of threat coverage. Alternative systems that do not use machine learning are usually focused either on minimizing false alarms at the cost of skipping some dangerous situations, or vice versa. For example, standard obstacle detection algorithms (lidar technologies or computer vision techniques) provide acceptable navigation in simple conditions, but are inferior to the presented approach in terms of the integral probability of successful flight and response speed. A comparative analysis of metrics confirms that the introduction of neural network threat analysis into autonomous navigation of an unmanned aerial vehicle without GPS provides a significant advantage in flight reliability and efficiency. However, there is still room for further optimization of the model and improvement of algorithms. Conclusion. The developed system for autonomous trajectory correction of an unmanned aerial vehicle, based on neural network analysis of potential threats, demonstrates the effective interaction of hardware and software modules that provide real-time monitoring and rapid response. The video sensor unit continuously collects data, which is analyzed by machine learning algorithms to identify dangerous objects in a timely manner and assess the environment. The data obtained is used to generate control signals that ensure the correction of the drone's route and the prevention of collisions or other risks. The proposed technique provides a high level of reliability and autonomy, which is especially important when operating in complex and rapidly changing conditions. The integration of machine vision, data analysis, and decision-making systems proves its practical value in both military and civilian scenarios, where strict requirements are placed on accuracy, communication stability, and maximum security. Further optimization of such solutions helps to increase the autonomy of unmanned complexes, increases their efficiency in various fields and ensures the adaptation of routes taking into account meteorological conditions, airspace congestion and other factors, reducing material and human losses.
References
1. Yakovlev, A. G., Baranov, D. E., & Shishkin, M. D. (2014). On the current state and trends in the application of new materials and technologies in the structures of unmanned aerial vehicles. Vector of Science of Togliatti State University, 1, 71-74.
2. Varlamov, O. O. (2017). On one approach to the metric of autonomy and intelligence of robotic complexes. Proceedings of the Kabardino-Balkar Scientific Center of the Russian Academy of Sciences, 6-2, 43-53.
3. Koptsev, V. A. (2024). Analysis of UAVs as relevant radar targets and their masking factors. International Journal of Humanities and Natural Sciences, 6-1, 244-250.
4. Varlamov, O. O., Lazarev, V. M., Chuvikov, D. A., & Jha, P. (2016). Prospects for the creation of autonomous intelligent robots based on mivar technologies. Radio Industry, 4, 96-105.
5. New multifunctional drones "Kasatka" and "Mikrob" developed in Russia. (n.d.). Retrieved January 26, 2025, from https://aif.ru/society/army/v-rossii-razrabotali-novye-mnogofunkcionalnye-drony-kasatka-i-mikrob
6. New multifunctional developments for SVO presented in Russia. (n.d.). Retrieved January 26, 2025, from https://news.mail.ru/svo/64559772/
7. Malychev, V. P., & Vinogradov, O. V. (2023). Possible directions for increasing the resilience of organizations necessary for the survival of the population in modern military conflicts. Problems of Risk Analysis, 5, 60-70.
8. Korneev, D. S. (2007). The use of neural networks for the creation of risk assessment and management models for enterprises. Management of Large Systems: Collection of Works, 17, 81-102.
9. Ovchinskiy, V. S. (2019). Technologies of the future against crime. LitRes.
10. Belyakova, E. V., Prokopovich, D. A., Ryzhaya, A. A., & Giltz, N. E. (2015). Logistic approach to the technological development of the industrial complex of the region. Bulletin of Siberian State Aerospace University named after academician M.F. Reshetnev, 4, 1007-1013.
11. Virelkin, A. D., & Kucheryavy, A. E. (2017). The use of unmanned aerial vehicles to solve "smart city" tasks. Information Technology and Telecommunications, 1, 105-113.
12. Krinichko, V. A., & Knyazev, E. A. (2023). Application of UAVs in the combat work of commanders. Scientific Aspect, 8, 537-546.
13. Dovgal, V. A., & Dovgal, D. V. (2020). Analysis of the security of a swarm of drones against attacks by malicious actors. Distance Education Technologies: Proceedings of the V International Scientific and Practical Conference. Ariyal.
14. Lastochkin, Y. I., Yarygin, Y. N., & Byvshikh, D. M. (2018). Methodological support for justifying methods of combat use of electronic warfare forces and means against electronic intelligence in operations of ground forces associations. Military Thought, 6, 58-66.
15. Burchenkov, V. V. (2020). Automated control systems for rolling stock. Belarusian State University of Transport.
16. Borovik, V. S., Hutsul, V. I., Klestov, S. A., Firsov, I. S., Pyhtyrev, V. S., Shatravin, V. V., Syryamkin, V. I., Shidlovsky, S. V., Shashev, D. V., Nguyen, K. T., Ugryumov, D. A., & Syryamkin, M. V. (2018). Teams of intelligent robots: areas of application. STT.
17. Terentyev, V. B. (2019). The method of convolution of probabilistic and parametric indicators of an aircraft. Fundamental and Applied Scientific Research: Current Issues, 51.
18. Sorokin, I. A., Romanov, P. N., Chesnokov, A. D., & Kondranevkova, T. E. (2023). Mathematical model for processing images of dangerous and harmful plants from UAV cameras. Bulletin of NGIEI, 5, 20-32.
19. Ali, B., Sadekov, R. N., & Tsodokova, V. V. (2022). Navigation algorithms for unmanned aerial vehicles using technical vision systems. Gyroscopy and Navigation, 4, 87-105.
20. Kostin, A. S. (2021). Information-measuring systems for monitoring the trajectory execution of aviation systems. Wave Electronics and Infocommunication Systems: Proceedings of the XXIV International Scientific Conference, Part 1, 219-226.
21. Xu, Y., Wei, Y., Wang, D., Jiang, K., & Deng, H. (2023). Multi-UAV path planning in GPS and communication denial environment. Sensors (Basel), 23(6), 2997.
22. Vera-Yanez, D., Pereira, A., Rodrigues, N., Molina, J. P., García, A. S., & Fernández-Caballero, A. (2023). Vision-based flying obstacle detection for avoiding midair collisions: A systematic review. J. Imaging, 9, 194.
23. Alharthi, R. (2024). Enhancing unmanned aerial vehicle and smart grid communication security using a ConvLSTM model for intrusion detection. Front. Energy Res., 12, 1491332.
First Peer Review
Peer reviewers' evaluations remain confidential and are not disclosed to the public. Only external reviews, authorized for publication by the article's author(s), are made public. Typically, these final reviews are conducted after the manuscript's revision. Adhering to our double-blind review policy, the reviewer's identity is kept confidential.
The list of publisher reviewers can be found here.
The article is devoted to the development of an intelligent system for monitoring and adapting the route of unmanned aerial vehicles (UAVs) using artificial intelligence technologies and neural network analysis. The main focus is on methods for identifying potential threats in real time and adjusting the trajectory of drones to ensure their safety and improve the efficiency of tasks. The authors rely on an integrated approach that includes: - Analysis of existing intelligent UAV control systems. - Description of the principles of operation of expert systems, machine learning and AI in the context of autonomous management. - Development of a model for autonomous route correction using machine vision and sensor data analysis. - Practical implementation of a Raspberry Pi and ESP8266-based system using cameras, data storage modules, and machine learning software algorithms. The methodological approach used is logical and well-founded, however, the article lacks an experimental verification of the system's performance on real data or its comparison with existing solutions. Adding such aspects would significantly enhance the evidence-based nature of the presented results. The work touches on topical issues of autonomous UAV control, which are used in various fields – from military operations to logistics and industry. Given the rapid growth in the use of unmanned systems, the topic is in demand. The proposed approach to risk analysis and route modification based on camera and sensor data is particularly important. The scientific novelty of the article lies in the proposed system of neural network risk analysis and adaptation of the UAV route in real time. The main innovations include: - The use of machine vision to identify threats. - Automatic correction of the trajectory, taking into account the detected factors. - Integration of multiple hardware and software components into a single system. Nevertheless, the article could include a more detailed comparison with existing methods, which would allow a more accurate assessment of the novelty of the approach. The article is written in an academic style, the structure of the work is logical and consistent. The main sections are highlighted, such as introduction, description of methods, implementation and conclusion. However, the text contains redundant descriptions of the technical details of hardware solutions, which complicates the perception of information. It would be useful to reduce or put technical details in separate appendices. There is practically no critical discussion of alternative approaches and possible disadvantages of the proposed system in the article. It would be useful to include an analysis of the limitations of the work, possible ways to improve the model, and a comparison with existing solutions. The conclusions clearly summarize the research results and confirm the effectiveness of the proposed system. However, they are primarily descriptive in nature and do not include quantitative metrics that confirm the practical value of the developed model. A comparative analysis with other systems or test results should be added. The work is of interest to specialists in the field of automated control systems, artificial intelligence and UAV development. It can be used by both researchers and engineers involved in the development of autonomous drones. Recommendations for further development: 1. Add an experimental verification of the system – provide testing data, an assessment of the accuracy of threat detection, and a comparison with alternative methods. 2. To develop a critical analysis – to include a discussion of possible disadvantages of the method, limitations of the work and directions for further research. 3. To clarify the conclusions, add quantitative metrics confirming the effectiveness of the proposed model. The article is an interesting study in the field of intelligent UAV control systems. The work is relevant, but requires further development in terms of experimental confirmation of the results, design and critical analysis. If these comments are corrected, the article may be recommended for publication. Recommendation: revision of the article and subsequent resubmission.
Second Peer Review
Peer reviewers' evaluations remain confidential and are not disclosed to the public. Only external reviews, authorized for publication by the article's author(s), are made public. Typically, these final reviews are conducted after the manuscript's revision. Adhering to our double-blind review policy, the reviewer's identity is kept confidential.
The list of publisher reviewers can be found here.
The presented article on "An intelligent system for monitoring and adapting the route of unmanned aerial vehicles based on neural network analysis of risk objects" corresponds to the topic of the journal "Software Systems and Computational Methods" and is devoted to the topical issue of using neural network technologies to analyze risk objects and make operational decisions about route adjustments, which is caused by the development of unmanned aerial vehicle technologies and the need for intelligent control systems that can effectively adapt the route to meet real threats and environmental changes. The article presents a fairly broad analysis of literary Russian and foreign sources on the research topic. The aim of the study is to create an artificial intelligence device that analyzes the environment in real time using data from cameras, sensors, and external sources. 2. Identifies potential threats (risk objects) such as weather conditions, obstacles, restricted flight zones, and moving objects. 3. Modifies the route of the UAV to ensure safety and improve the efficiency of the task. The style and language of the presentation of the material is scientific and accessible to a wide range of readers. The volume of the article corresponds to the recommended volume of 12,000 characters or more. The article is quite structured - there is an introduction, conclusion, internal division of the main part (implementation, testing methodology, experimental results, critical analysis, quantitative metrics and comparison with existing approaches). The authors analyzed the advantages of using unmanned aerial vehicles to transmit information. It also determined the consistent application of software and technical methods necessary to develop a system for autonomous correction of the trajectory of the UAV from the point of view of the technical implementation of the drone. As a solution to this problem, the authors propose a comprehensive technical implementation through the development of a hinged contour. The schematic graphic electronic circuit is shown in the figure. The authors also provide a technical and functional description of the elements presented in the graphical electronic circuit, the results are presented in the table. The logic of operation of the presented components as part of a single hardware circuit is also presented by the authors in tabular form. An experimental test was conducted to assess the operability of an autonomous unmanned aerial vehicle in the absence of a GPS signal. Quantitative parameters reflecting the success of the tasks were recorded. During the testing, the following parameters were analyzed: the proportion of completed missions; the trajectory of the vehicle; the time interval between the detection of a threat and the start of an evasive maneuver; the number of false alarms of the detector; the accuracy of obstacle classification. The methodological approach made it possible to collect statistically significant data and quantify the functioning of the system under reproducible conditions. The experimental results are presented graphically. The results obtained confirm the operability of the proposed system, however, the authors have identified a number of limitations of the current implementation - the dependence of efficiency on environmental conditions; high accuracy in the average case, but is not completely error-free; accumulation of navigation errors in the absence of GPS; increased computational load with active use of the neural network module. For an objective assessment, the authors calculated quantitative metrics, which were then compared with the characteristics of alternative solutions. The practical significance of the article is clearly justified. The developed system for autonomous trajectory correction of an unmanned aerial vehicle, based on neural network analysis of potential threats, demonstrates the effective interaction of hardware and software modules that provide real-time monitoring and rapid response. The article "An intelligent system for monitoring and adapting the route of unmanned aerial vehicles based on neural network analysis of risk objects" can be recommended for publication in the journal Software Systems and Computational Methods.
|







