|
Software systems and computational methods
Reference:
Pritykin, F.N., Nebritov, V.I. (2021). Graphic optimization model of the process of welding products by a robot based on Radishchev blueprint. Software systems and computational methods, 2, 63–73. https://doi.org/10.7256/2454-0714.2021.2.35507
Graphic optimization model of the process of welding products by a robot based on Radishchev blueprint
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Department of Engineering Geometry and CAD, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Pr. Mira, 11

|
pritykin@mail.ru
|
|
 |
Other publications by this author
|
|
|
Nebritov Valeriy Ivanovich
Postgraduate Student, Department of Engineering Geometry and CAD, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, pr. Mira, 11
|
|
vnebritov@gmail.com
|
|
|
Other publications by this author
|
|
|
DOI: 10.7256/2454-0714.2021.2.35507
Received:
14-04-2021
Published:
04-07-2021
Abstract:
This article reviews the example of using a geometric model of a hypersurface in multidimensional space on the Radishchev blueprint, which reflects interconnection between the four variables in solution of one of the tasks associated with structuring the technological process fulfilled by a welding robot. In structuring technological processes related to welding, it is necessary to solve the optimization task of determining the position of the foundation of welding robot relative to the welded brackets and the axis of the container of cylindrical shape. The welding process requires finding the most optimal welding robot, the geometric model of the kinematic chain of which would move the output link and welding head across all sections of welding seams. As an example, the author reviews the case when the robot is outside the cylindrical container, and welding objects inside and outside. For carrying out the optimization task, the author examines the correlation between the parameters that determine the position of the robot relative to the container, and the minimum possible vertical displacement of the center of the output link based on the graphic optimization model. The multicomponent system comprised of the four parameters is studied based on the Radishchev blueprint. The author drew the combinations of curves that set the framework of curve lines of the dual level of the hypersurface in the four-dimensional space. For determination of the curves, the author found the combinations of projections of the dots on the Radishchev blueprint. The use of dual level lines on the Radishchev blueprint allowed determining most optimal position of the manipulator mechanism with regards to the cylindrical surface in welding the items for various industrial robots described in this article.
Keywords:
movement synthesis of manipulator, geometric modeling, Radishchev drawing, multidimensional space, optimization problem, brackets, welding, welding robot, hypersurface, cylindrical surface
Введение
Известно, что многомерная начертательная геометрия имеет возможность рассматривать многомерные объекты в качестве геометрических моделей многих переменных [1-5]. Это позволяет наглядно представлять зависимости указанных параметров в виде графических моделей, с помощью которых можно устанавливать оптимальные параметры и характеристики исследуемых процессов [6-13]. Рассмотрим пример использования геометрической модели гиперповерхности в многомерном пространстве на чертеже Радищева, отражающей взаимосвязь четырех переменных при решении одной из задач, связанной с проектированием технологического процесса выполняемого сварочным роботом.
Использование сварочных роботов позволяет освободить обслуживающий персонал от выполнения рутинной и однообразной работы, выполняемой часто в агрессивных средах. Одним из примеров этому является выполнение сварочных работ, связанных с креплением кронштейнов, располагающихся как снаружи, так и внутри различных поверхностей (емкостей для хранения сыпучих и жидких материалов, топливных баков и д.р.). В качестве указанных поверхностей часто выступают цилиндрические поверхности.
Постановка задачи
На рисунке 1 представлена емкость, внутри и снаружи которой необходимо приваривать кронштейны. Для этого решим задачу оптимального размещения сварочного робота, который осуществляет сварку кронштейнов к указанной емкости имеющей форму цилиндрической поверхности. При этом, снаружи цилиндрической поверхности используются направляющие рельсы, по которым может перемещаться основание робота. Направляющие рельсы крепятся жестко к полу (на фундамент), либо к тяжелой металлоконструкции, чтобы обеспечить точность при его работе. Внутри емкости робот может осуществлять сварку кронштейнов только с торцов цилиндрической поверхности на некоторую длину lт. Кронштейны, располагающиеся внутри емкости более указанной длины lт, могут привариваться обычным способом, вручную без использования робота. Кронштейны используются для крепления вспомогательного оборудования. Для выполнения процесса сварки изделий, необходимо определить наиболее оптимальный сварочный робот, геометрическая модель кинематической цепи которого позволит осуществлять движение выходного звена (ВЗ) и сварочной головки по всем участкам сварочных швов.
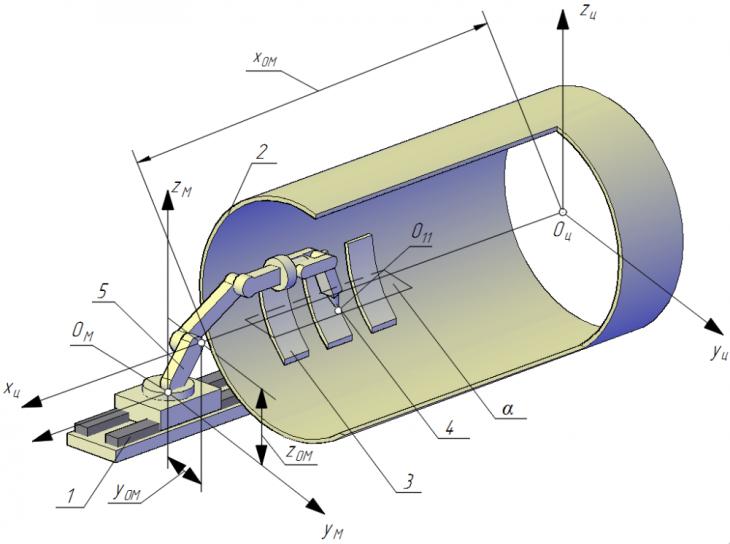
Рисунок 1 Схема расположения сварочного робота и сварной головки внутри емкости цилиндрической формы: 1 — направляющие рельсы; 2 — отсек цилиндрической поверхности; 3 — кронштейны; 4 — сварочная головка; 5 — сварочный робот
При этом необходимо определить максимальную длину цилиндра 2*lт, внутри которого может достигать робот швов при его нахождении с торцов этой поверхности. Так как звенья робота совершают движения внутри цилиндра, то эта поверхность выступает в роли запретной зоны. Для анализа движения звеньев робота и ВЗ при сварке изделий может быть использовано компьютерное моделирование. В основу процесса компьютерного моделирования положен синтез движений по заданным траекториям (определяемым сварными швами) по вектору скоростей [14-19]. Для компьютерного моделирования использовались десять моделей промышленных роботов, геометрические и кинематические параметры которых заданы в таблице 1. Внешний вид и зона обслуживания трех из указанных роботов представлены в таблице 2.
Таблица 1 — Геометрические параметры, характеризующие модели кинематических цепей сварочных роботов
|
№
|
Модель робота
|
Длины звеньев, мм
|
Пределы изменения обобщённых координат
|
|
l1
|
l2
|
l3
|
l4
|
q1
|
q2
|
q3
|
q4
|
q5
|
q6
|
|
1
|
ABB IRB 6640
|
150
|
1700
|
1000
|
200
|
±170
|
+85..-65
|
+70..-180
|
±300
|
±120
|
±360
|
|
2
|
ABB IRB 6660 - 130/3.1
|
150
|
1794
|
1526
|
200
|
±180
|
+85..-42
|
+120..-20
|
±300
|
±120
|
±360
|
|
3
|
FANUC R-1000iA
|
450
|
1095
|
1015
|
190
|
±180
|
±125
|
±180
|
±360
|
±125
|
±360
|
|
4
|
GSK RB165
|
419
|
1568
|
1070
|
200
|
±175
|
+75..-60
|
+80..-185
|
±360
|
±115
|
±360
|
|
5
|
Hwashi HS-R6-165
|
178
|
1727
|
1750
|
200
|
±180
|
+80°..-60
|
+80..-190
|
±360
|
±115°
|
±360
|
|
6
|
Kawasaki CX165L
|
550
|
1490
|
1190
|
235
|
±160
|
+80°..-60
|
+95..-75
|
±210
|
±120
|
±360
|
|
7
|
Kuka KR150 R3100-2
|
645
|
1465
|
1420
|
215
|
±185
|
-50..+95
|
-120..+168
|
±350
|
±125
|
±350
|
|
8
|
Nachi SRA166
|
640
|
1190
|
1160
|
245
|
±180
|
+60..-80
|
+150..-146.5
|
±210
|
±120
|
±205
|
|
9
|
Purelogic GP2100-50
|
650
|
1113
|
1518
|
197
|
±180
|
+140..-77
|
+75..-184
|
±360
|
±115
|
±450
|
|
10
|
Yaskawa Motoman MH215 II
|
650
|
1400
|
1490
|
250
|
±180
|
-60..+76
|
–142,5..+230
|
±360
|
±125
|
±360
|
Таблица 2 — Внешний вид и зона обслуживания роботов
| Номер в таблице 1 |
Внешний вид робота |
Зона обслуживания |
| 1 |
 |
 |
| 3 |
 |
 |
| 6 |
 |
 |
При проектировании технологических процессов связанных со сваркой изделий, необходимо решить оптимизационную задачу, связанную с определением положения основания сварочного робота по отношению к привариваемым кронштейнам и оси емкости цилиндрической формы. На рисунке 1 задана система координат Оцxцyцzц, ось Оцxц которой совпадает с осью цилиндрической поверхности. Данную систему координат примем в качестве неподвижной. Координаты yом и zом определяют положение базовой точки Ом основания манипулятора относительно оси Оцxц емкости цилиндрической формы. Координата xом определяет положение базовой точки основания манипулятора относительно привариваемого кронштейна и соответственно сварочных швов. Очевидно, что значения координат xом, yом и zом должны быть заданы в диапазоне допустимых значений, при которых возможно движение ВЗ манипулятора по заданным траекториям вдоль сварных швов с заданной ориентацией.
Метод анализа манёвренности манипулятора в зоне расположения кронштейна
Для анализа маневренности механизма манипулятора в зоне расположения кронштейна используем параметр Lh, который определяется по зависимости:
Lh = (min (lВ(min), lН(min))), (1)
где функция min определяет минимальное значение из переменных lВ(min) и lН(min), задающих минимально возможные смещения центра ВЗ по направлению оси Оцzц вверх и вниз от плоскости `alpha` при заданной ориентации ВЗ. Плоскость `alpha` `_|_` ` ` Оцzц располагается на середине высоты кронштейна (см. рис. 2). На рисунке 2 параметр h = 570 обозначает половину высоты кронштейна. Для определения значений переменных lВ(min) и lН(min) в плоскости `alpha` зададим стартовые точки B`alpha` 1, B`alpha` 2, … , B`alpha` i по сетке с заданным шагом `Delta` xb и `Delta` yb. С помощью компьютерного моделирования, начальная точка движения центра ВЗ последовательно совмещается с одной из точек B`alpha` i плоскости `alpha` и далее выполняется компьютерное моделирование движения по траекториям параллельным оси Оцzц с заданной ориентацией. Пусть количество стартовых точек в плоскости a равно параметру Na.
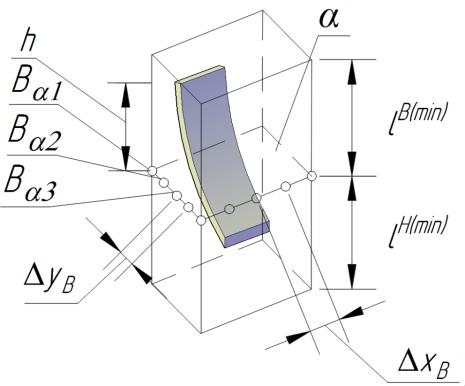
Рис. 2 Положения стартовых точек B`alpha` i в плоскости `alpha` и смещения центра ВЗ по направлению оси Оцzц относительно кронштейна
Далее для каждой стартовой точки Bai определяется максимальное возможное смещение центра ВЗ вверх и вниз по вертикальной траектории с заданной ориентацией ВЗ. Результаты указанного компьютерного моделирования для одной из точек B`alpha` i механизма робота Kuka KR150 R3100-2 представлены на рис. 3.
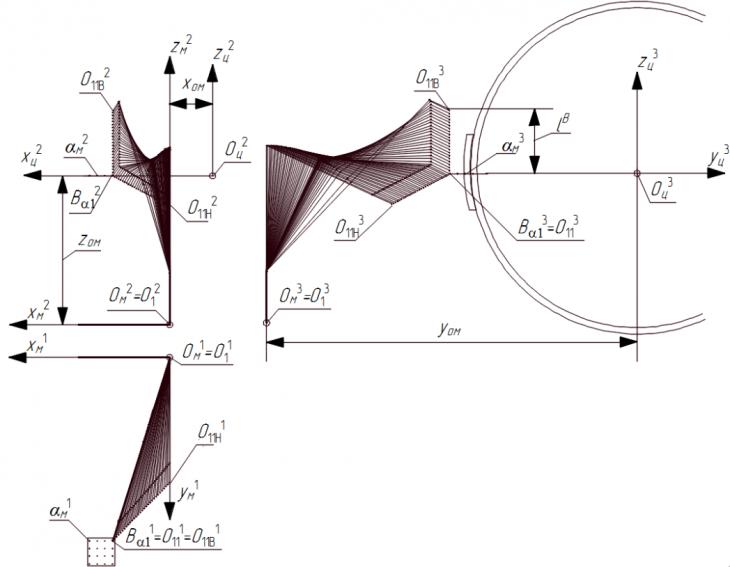
Рис. 3 Результаты компьютерного моделирования с целью определения значения параметра Lh
На рисунке 3 проекции точек О11 (О111, О211, О311) и О11В (О111В, О211В, О311В) соответственно задают начальную и конечную точку траектории движения центра ВЗ. Таким образом могут быть получены смещения l1В, l1H, l2В, l2H, … , lN`alpha` В, lN`alpha` H для различных точек B`alpha` i определяемых параметром N`alpha` . Где параметры l1В и l1H определяют величины смещения, соответственно, вверх и вниз относительно плоскости α по вертикальным траекториям точки с номером один. Среди значений l1В, l1H, l2В, l2H, … , lN`alpha` В, lN`alpha` H необходимо выбрать минимальные значения l1В(min) и l1Н(min). Величины смещений l1В, l1H, l2В, l2H, … , lN`alpha` В, lN`alpha` H ограничены предельными значениями обобщенных координат и запретной зоной в роли которой выступает цилиндрическая емкость.
Результаты моделирования синтеза движения сварочных роботов
Исследуем взаимосвязь параметров xом, yом и zом и Lh с помощью графической оптимизационной модели. Многокомпонентную систему, определяемую четырьмя параметрами xом, yом и zом и Lh, исследуем с помощью чертежа Радищева [20-22]. На рисунке 4 построены совокупности кривых, задающих каркас кривых линий двойного уровня гиперповерхности в четырехмерном пространстве. Гиперповерхность отражает функцию Lh = f(xом, yом, zом). Для определения кривых необходимо найти совокупности проекций точек на чертеже Радищева. Каждая точка гиперповерхности получается заданием координат xом, yом и zом и вычислением с помощью компьютерного моделирования значения параметра Lh. Параметр Lh задает максимально допустимую высоту прямоугольного параллелепипеда, внутри которого может осуществлять движение выходное звено с заданной ориентацией оси схватоносителя (1).
Чем больше будет значение параметра Lh тем больше будет маневренность манипулятора в зоне нахождения кронштейна. Кронштейн не должен выступать за пределы размеров параллелепипеда. Анализ графиков функций для механизма робота Kuka KR150 R3100-2 на рисунке 4 показывает, что максимальное значение параметра Lh задает точка А заданная проекциями А1, А2, А3 с координатами (720,300,1500,570). Таким образом, определенные значения координат xом, yом и zом задают наиболее удаленное оптимальное положение основания манипулятора по отношению к привариваемым кронштейнам. При найденном положении основания манипулятора в диапазоне изменения координаты xом от 750 до -750 может осуществляться сварка кронштейнов высота которых будет равна 2*lкр. На рисунке 5 приведены результаты моделирования движения робота Kuka KR150 R3100-2 при сварке кронштейна с наружи цилиндрической поверхности.
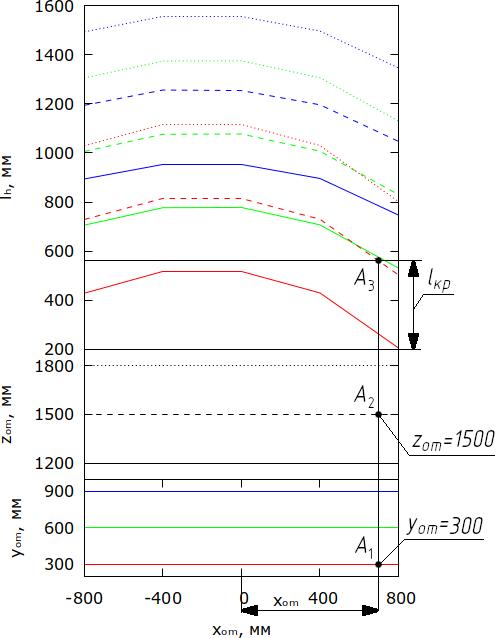
Рис. 4 Изображение гиперповерхности Lh = f(xом, yом, zом) с помощью двойных линий уровня на чертеже Радищева
 
Рис. 5 Результаты компьютерного моделирования движения робота Kuka KR150 R3100-2 при сварке изделий
Выводы и заключение
Правильная ссылка на статью: Притыкин Ф.Н., Небритов В.И. — Определение формы и размеров области в шестимерном пространстве задающей допустимые мгновенные состояния механизма руки антропоморфного робота // Программные системы и вычислительные методы. – 2019. – № 4. – С. 115 - 124. DOI: 10.7256/2454-0714.2019.4.31065 URL: https://nbpublish.com/library_read_article.php?id=31065
Выводы и заключение
Правильная ссылка на статью: Притыкин Ф.Н., Небритов В.И. — Определение формы и размеров области в шестимерном пространстве задающей допустимые мгновенные состояния механизма руки антропоморфного робота // Программные системы и вычислительные методы. – 2019. – № 4. – С. 115 - 124. DOI: 10.7256/2454-0714.2019.4.31065 URL: https://nbpublish.com/library_read_article.php?id=31065
Выводы и заключение
Правильная ссылка на статью: Притыкин Ф.Н., Небритов В.И. — Определение формы и размеров области в шестимерном пространстве задающей допустимые мгновенные состояния механизма руки антропоморфного робота // Программные системы и вычислительные методы. – 2019. – № 4. – С. 115 - 124. DOI: 10.7256/2454-0714.2019.4.31065 URL: https://nbpublish.com/library_read_article.php?id=31065
Выводы и заключение
Использование построений линий двойного уровня на чертеже Радищева позволило определить наиболее оптимальное положение механизма манипулятора относительно цилиндрической поверхности при сварке изделий для различных промышленных роботов, представленных в таблице 1. Результаты компьютерного моделирования указывают что наибольшую длину размещения кронштейнов вдоль оси xом обеспечивает механизм робота Kuka KR150 R3100-2.
References
1. Vertinskaya, N. D. Zadachi geometricheskogo modelirovaniya tekhnologicheskikh protsessov: nauchno-metodicheskoe posobie / N. D. Vertinskaya. – M.: Izdatel'skii dom Akademii Estestvoznaniya, 2015. – 132 s.
2. Volkov, V. Ya. Kurs nachertatel'noi geometrii na osnove geometricheskogo modelirovaniya / V. Ya. Volkov, V. Yu. Yurkov, K. L. Panchuk, N. V. Kaigorodtseva. – Omsk, Izd-vo SibADI, 2010. – 253 s.
3. Ivanov, G. S. Teoreticheskie osnovy nachertatel'noi geometrii: Uchebnoe posobie. – Moskva: Mashinostroenie, 1998. – 158 s. – ISBN 5-217-02673-1.
4. Fillipov, P. V. Nachertatel'naya geometriya mnogomernogo prostranstva i ee prilozheniya. – Leningrad, Izd-vo Leningrad. univ., 1979. – 280 s.
5. Yurkov, V. Yu., Inzhenernaya geometriya i osnovy geometricheskogo modelirovaniya: Uchebnoe posobie / V. Yu. Yurkov, , V. Ya. Volkov, O. M. Kulikova. – Omsk: OGIS, 2005. – 119 s.
6. Volkov, V. Ya. Graficheskie optimizatsionnye modeli mnogofaktornykh protsessov / V. Ya. Volkov, M. A. Chizhik. − Omsk : Omskii gosudarstvennyi institut servisa, 2009. − 101 s.
7. Konopatskii, E.V. Geometricheskoe modelirovanie i optimizatsiya fiziko-mekhanicheskikh svoistv degtepolimerbetona / E.V. Konopatskii, A.I. Bumaga, A.A. Krys'ko, O.S. Voronova // Informatsionnye tekhnologii v proektirovanii i proizvodstve. – M.: NTTs «Kompas», 2019. – № 1 (173). – S. 20-24.
8. Konopatskii, E.V. Podkhod k postroeniyu geometricheskikh modelei mnogofaktornykh protsessov mnogomernoi interpolyatsii / E.V. Konopatskii // Programmnaya inzheneriya. – M.: 2019. – T.10, № 2. – S. 77-86.
9. Konopatskii, E.V. Modelirovanie approksimiruyushchego 16-tochechnogo otseka poverkhnosti otklika, primenitel'no k resheniyu neodnorodnogo uravneniya teploprovodnosti / E.V. Konopatskii // Geometriya i grafika. – M.: Infra-M, 2019. – T.7. – №2. – S.38-45. – DOI: 10.12737/article_5d2c1a551a22c5.12136357.
10. Chizhik, M.A. Geometricheskoe modelirovanie mnogofaktornykh protsessov na baze proektsionnykh algoritmov / M.A. Chizhik, M.N. Moskovtsev, D.P. Monastyrenko // Omskii nauchnyi vestnik. – Omsk: OmGTU, 2013. – №1(117)2013. – S.14-17.
11. Makashina, E.V. Geometricheskoe modelirovanie vremennykh ryadov v mnogomernom prostranstve / E.V. Makashina // Geometriya i grafika. – M.: Infra-M, 2013. – T.1, № 1. – S. 20-21. – DOI: 10.12737/464.
12. Yakovenko, K.S. Metod geometricheskogo analiza modelei mnogofaktornykh protsessov / K.S. Yakovenko, V.Ya. Volkov, V.S. Prokopets // Vestnik SibADI. – Omsk: SibADI, 2012. – Vyp. 3(25). – S. 87-91.
13. Chizhik, M.A. Metodologiya parametricheskogo proektirovaniya tekhnologicheskikh protsessov shveinogo proizvodstva na osnove mnogomernogo geometricheskogo modelirovaniya: dis. … dokt. tekhn. nauk: 05.19.04. / M.A. Chizhik. – SPb., 2018. – 272 s.
14. Kobrinskii, A. A. Manipulyatsionnye sistemy robotov / A. A. Kobrinskii, A. E. Kobrinskii. – M.: Nauka. 1985. – 343 s.
15. Whitney D. E. The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators / D. E. Wihtney // J. Dyn. Sys., Meas., Control, 2010. – №94(4). – pp. 303-309.
16. Korendyasev, A. I. Manipulyatsionnye sistemy robotov / A. I. Korendyasev, B. L. Salamandra, L. I. Tyves. – Moskva: Mashinostroenie, 1989. – 472 s.
17. Pritykin, F. N. Virtual'noe modelirovanie dvizhenii robotov, imeyushchikh razlichnuyu strukturu kinematicheskikh tsepei: monografiya / F. N. Pritykin. – Omsk: Izd-vo OmGTU, 2014. – 172 s.
18. Pritykin, F. N. Sposob preodoleniya tupikovykh situatsii pri dvizhenii do tselevoi tochki po proizvol'noi traektorii tsentra vykhodnogo zvena/ F. N. Pritykin, V. I. Nebritov // Vestnik komp'yuternykh i informatsionnykh tekhnologii - 2019. - № 12. - S. 3-9.
19. Pritykin, F. N. Opredelenie formy i razmerov oblasti v shestimernom prostranstve zadayushchei dopustimye mgnovennye sostoyaniya mekhanizma ruki antropomorfnogo robota / F. N. Pritykin, V. I. Nebritov // Programmnye sistemy i vychislitel'nye metody. - 2019. - № 4. - S.115-124.
20. Volkov, V.Ya. Mnogomernaya ischislitel'naya geometriya: monografiya /V.Ya. Volkov, V.Yu. Yurkov. – Omsk: Izd-vo OmGPU, 2008. – 244 s.
21. Radishchev, V.P. O primenenii geometrii chetyrekh izmerenii k postroeniyu raznovesnykh fiziko-khimicheskikh diagramm / V.P. Radishchev // Izv. Sektora fiz.-khim. analiza. – 1947. – T. 15. – S. 129-134.
22. Konopatskii, E.V. Vychislitel'nye algoritmy modelirovaniya odnomernykh obvodov cherez k napered zadannykh tochek / E.V. Konopatskii, A.A. Krys'ko, A.I. Bumaga // Geometriya i grafika. – M.: Infra-M, 2018. – №3. – S.20-32. – DOI: 10.12737/article_5bc457ece18491.72807735
|







