|
DOI: 10.7256/2454-0714.2018.2.26217
Received:
07-05-2018
Published:
13-06-2018
Abstract:
The basic requirements for the on-board complex of the spacecraft for purposes of guidance and landing on small bodies of the solar system are formulated in the work. The main tasks of the landing and landing vehicles are braking and approaching the surface of the celestial body, landing, working on its surface, possibly taking off from the surface to deliver the returned vehicle to the ground. Providing high requirements to the accuracy and reliability of the on-board guidance and landing system, an actual solution is proposed. Using the traditional approach to the modeling of processes and systems, a functional model of the onboard guidance and landing system in IDEF0 notation was created. In the process of creating a functional model, the main processes performed by the complex during descent from orbit and landing are described. As a result of the work, a description of the procedures performed by the multifunctional on-board guidance and landing system of the spacecraft has been obtained. An applied functional model of the "to-be" level was constructed, based on the use of an integrated approach. The proposed integrated approach is focused on the sharing of data from all on-board devices, both basic and backup information. This approach allows to increase the accuracy and reliability of the landing procedure.
Keywords:
Onboard multifunctional environment, visual guidance, integrated approach, navigation of the spacecraft, guidance of the spacecraft, landing a spacecraft, functional model, optical direction finder, optical processing, small bodies
Краткий анализ проблемы построения многофункционального бортового комплекса наведения и посадки.
Процедура спуска и посадки один из самых важных и ответственных этапов космического полета, только успешное его выполнение позволит решить поставленные задачи. При разработке данной модели было принято ограничение, что рассматривается посадка на малые тела солнечной системы, которые обладают незначительной силой притяжения, а атмосфера отсутствует. Схемы спуска предполагает использование реактивных двигательных установок, для коррекции манёвра спуска и посадки КЛА.
Посадка на малые тела солнечной системы необходима, как минимум, по двум причинам. Первая причина – изучение состава таких тел. Согласно общепринятой гипотезе, некоторые из малых тел сложены из первородной материи, той самой, из которой образовалась солнечная система. Таким образом их изучение должно дополнить знания научного сообщества и понимание процесса формирования нашего мира. Вторая причина – отведение угрожающих тел, которые могут столкнуться с Землей, вызвав апокалипсис [1-7]. В обоих случаях, необходима либо посадка на поверхность, либо наведение КЛА вплотную к поверхности МТСС [3,4,8]. Как уже отмечалось, посадка является одним из самых сложных этапов космической миссии. Это, в первую очередь связано с большим удалением от Земли. Из-за ограниченной скорости распространения света ручное управление процедурой посадки с Земли в реальном масштабе времени невозможно. Таким образом, посадка должна выполняться автономно [9-19]. К месту посадки аппарата предъявляются жесткие требования по ориентации антенн связи для контакта с Землей, освещённости, для заряда батарей, а также рельефу, для того, чтобы аппарат при посадке не перевернулся. Таким образом, требования к точности посадки следует признать высокими, что усложняет задачу автономного наведения и посадки [20].
Ограниченная мощность бортовых вычислительных ресурсов не позволяет, по крайней мере на данный момент, выполнить все процедуры полностью автоматически. Требуется вмешательство в работу центра управления полетами (ЦУП) [8,21]. Однако заключительный этап посадки, когда КЛА начнет сходы с траектории искусственного спутника (ИС) МТСС и посадку на его поверхность будет выполняться полностью автономно. Для повышения точности этого этапа предлагается использовать оптический пеленгатор в составе бортового комплекса наведения и посадки. Принцип действия пеленгатора основан на оптической обработке пространственной двухмерной информации для постоянного определения угловых координат места посадки путем распознавания образов [8,21].
Для повышения надежности заключительного этапа посадки авторами предлагается использовать комплексную обработку данных от всех бортовых устройств. Для решения поставленных задач предлагается многофункциональный бортовой комплекс наведения и посадки (БКНП) КЛА. БКНП в режиме «Посадка» осуществляет управление работой бортовых устройств, для решения навигационных задач, автономную обработку получаемой информацией и обмен данными при спуске КЛА на поверхность МТСС. Навигационные-посадочные задачи включают: уточнение орбиты космического аппарата КЛА на трассе перелета и при маневрировании на траектории искусственного спутника малого тела солнечной системы; уточнение траектории МТСС; выбор района посадки на МТСС; навигационная поддержка посадки; измерения расстояния до поверхности и составляющие относительной скорости КЛА. Полученные в процессе спуска и посадки данные должны обеспечивать целый комплекс задач, включая: уточнение модели фигуры МТСС, создание карт рельефа; уточнение параметров собственного возмущенного движения малого тела солнечной системы и траектории его движения, и ряд других научных задач [9-20].
Проектирование системы в нотации IDEF0. Моделирование контекстной диаграммы.
Объектом выступает бортовой комплекс наведения и посадки КЛА. Рассматриваются процессы, происходящие внутри него. Основная задача описание процесса посадки КЛА на поверхность МТСС для создания функциональной модели БКНП [22]. Для достижения этой задачи необходимо описать процедуру навигации КЛА на орбите искусственного спутника МТСС, для детального изучения параметров его движения и создания цифровой модели малого тела. Полученные на этом этапе данные необходимы для уточнения процедуры наведения и посадки КЛА. При корректировке сведений об интересующем МТСС и его детальной съемке широко задействован БКНП, что делает описание этих процедур неотъемлемой частью настоящего исследования. На основе анализа, выполненного в рамках настоящей работы, были определенны вводные данные моделируемого процесса:
1) по управлению:
• Полетное задание;
• Задачи миссии;
2) по входу:
• Траектория КЛА (баллистические данные);
• Траектория исследуемого тела;
3) по механизму:
• БКНП (Бортовой комплекс наведения и посадки);
• ЦУП (центру управления полетами);
3) по выходу:
• Отчет о посадке КЛА.
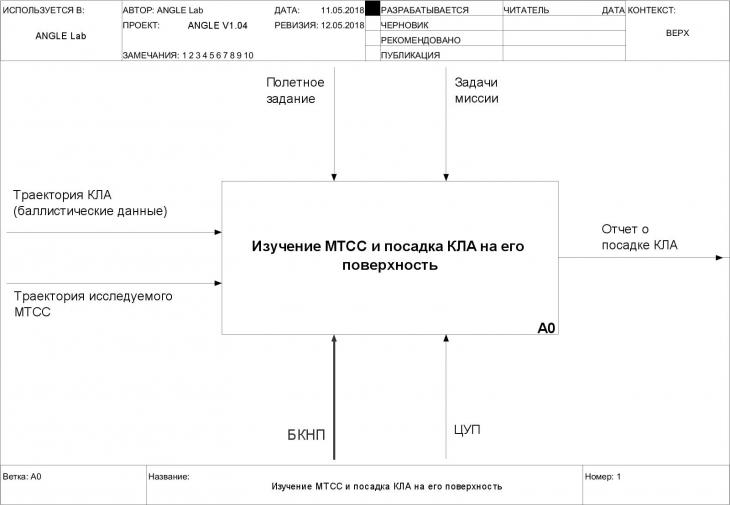
Рисунок 1 – Контекстная диаграмма процедуры изучения малого тела и посадки КЛА на его поверхность в нотации IDEF0.
Описанные выше вводные параметры на уровне контекстной диаграммы А-0 были представлены в виде следующих граничных связей для функционального блока изучение малого тела солнечной системы (МТСС) и посадка космического летательного аппарата (КЛА) на его поверхность, изображенного на рисунке 1. В соответствии с требованиями методологии IDEF0 была выполнена дальнейшая декомпозиция описываемых процессов, результаты которой представлены на рисунке 2.
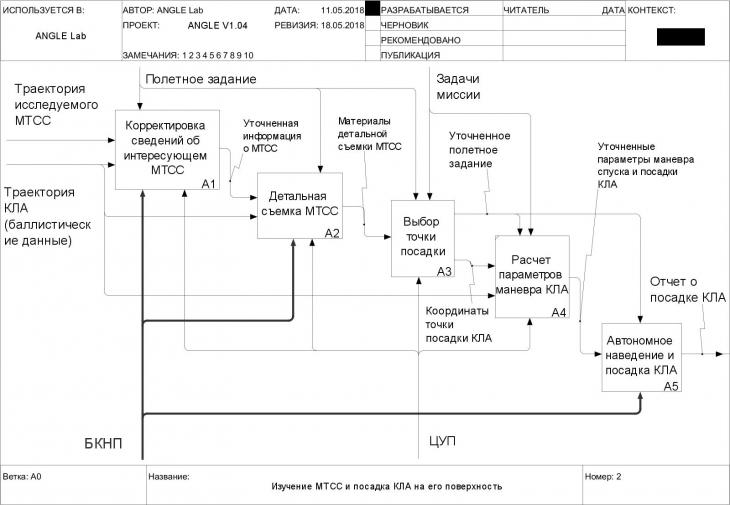
Рисунок 2 – Диаграмма декомпозиции контекстной диаграммы «Посадка КЛА на поверхность МТСС» в нотации IDEF0.
На диаграмме уровня А0 декомпозиции функционального блока изучение малого тела солнечной системы и посадка космического летательного аппарата на его поверхность обозначены процессы и функциональные блоки выполняемые в рамках процедуры:
· Корректировка сведений об интересующем МТСС, (А1);
· Детальная съемка МТСС, (А2);
· Выбор точки посадки, (А3);
· Расчет параметров маневра посадки КЛА, (А4);
· Автономное наведение и посадка КЛА, (А5).
Задачей является создание функциональной модели бортового комплекса, осуществляющего процедуру автономного наведения и посадки КЛА, на последнем этапе, после схода с траектории ИС МТСС, спуске и посадке на поверхность малого тела. Основная задача БКНП повышение точности и надежности процесса автономной посадки. Руководствуясь приведенными ранее соображениями и ограничениями, была построена диаграмма на которой отображаются процессы и связи между ними.
Первым процессом, определенным на основе анализа предметной области, является Корректировка сведений об интересующем небесном теле, который в процессе функционирования получает в качестве исходных данных траекторию и другие параметры движения МТСС. Эти исходные данные являются первичными и могут быть недостаточно точными для осуществления всех этапов космической миссии. Поиск малых тел солнечной системы, как правило осуществляется на Земле, традиционными методами, например, сравнением фотографических изображений звездного неба. После обнаружения МТСС на фотографических изображениях, с помощью специальных алгоритмов вычисляются параметры траектории движения таких тел. При этом невозможно учесть ряд объективных параметров, искажающих расчетные значения параметров, таких как: влияние атмосферы, возмущающие воздействия от других малых и больших тел солнечной системы, собственное возмущенное движение, например, вращение и т.д. Точности этих параметров, однако, достаточно для того, что сблизить КЛА с изучаемым телом настолько, чтобы стало возможным дальнейшее детальное изучение МТСС. В процессе детального изучения МТСС уточняются параметры движения МТСС, а также впервые определяются такие параметры малого тела солнечной системы, как его размеры, форма, объем, масса, плотность и другие параметры, которые требуется учитывать при наведении и посадке КЛА. Параметры, включая траекторию движения малого тела уточняются бортовыми средствами КЛА, в основном визуальными. При этом необходимо располагать точными данными о положении самого КЛА. Задача точного определения параметров возложена на БКНП, в частности на звездные датчики, фотокамеры, инерциальные датчики и вычислительные средства, которые входят в его состав. В этой ситуации БКНП выступает в роли механизма, проектируемого функционального блока. Процедуры и алгоритмы работы рассматриваемого функционального блока выполняются в соответствии с документами полетного задания, которое выступает в роли управления. Под полетным заданием в работе подразумевается описание алгоритмов и правил выполнения различных этапов и отдельных процедур в рамках миссии. В результат функционирования блока на выходе получаем Уточненную информацию о малом теле. Заметим, что в этом блоке выделено получение и уточнение тех параметров, которые влияют на баллистику маневра посадки КЛА на поверхность изучаемого тела.
Для создания цифровой модели МТСС, а также карт и выбора точки посадки КЛА производится детальная фотосъемка изучаемого малого тела солнечной системы. Соответственно функциональный блок «Выполнение детальной съемки МТСС», работает используя уточненную информацию о небесном теле, полученную из функционального блока А1, а также использую Траектория КЛА (баллистические данные), которые в свою очередь являются граничной связью. В качестве управления функционального блока используется полетное задание, в качестве механизма Бортовой комплекс наведения и посадки (БКНП), а также ЦУП. Под работой центра управления полетами подразумевается работа команды ученых, вовлеченных в миссию. Бортовых вычислительных средств недостаточно, для создания всех необходимых материалов, в том числе цифровой трехмерной модели МТСС, карт и т.д. Именно поэтому эту часть работы целесообразно выполнять при помощи наземных служб.
Следующим функциональным блоком процедуры посадки, является Выбор точки посадки. После создания всех пространственных (топографических) материалов выбирается место посадки, которое отвечает всем требованиям, по ориентации на Землю, освещенности и отсутствию опасных форм рельефа, которые могут быть опасны для КЛА при посадке. Выбор точки посадки, а также резервных точек посадки производится учеными разных специальностей на Земле, поэтому инструментом выступает центру управления полетами (ЦУП), как некое обобщение наземной команды миссии. По результатам этой работы, после того, как выбраны основная и резервные точки посадки, их координаты закладываются с Земли в бортовой комплекс наведения и посадки с целью коррекции полетного задания и передачи материалов. В качестве механизма используются центр управления полетами (ЦУП) совместно с БКНП. Полностью автоматически скорректировать полетное задание используя только БКНП невозможно, поэтому используются все вычислительные мощности на Земле. Остановимся более подробно на этой процедуре. Уточненное полетное задание фактически создается на Земле и закладывается в бортовой комплекс наведения и посадки центром управления полетами. Заметим, что использование ЦУП не противоречит общей концепции заложенной в данной работе. Автономно выполняется наиболее ответственный этап посадки – сход с орбиты искусственного спутника МТСС и посадка в точке с заранее определенными координатами. В свою очередь целью и результатом функционирования блока определение координат посадки, являются пространственные данные – координаты точки посадки КЛА. Координаты точки посадки используются для дальнейшего расчета параметров баллистического маневра посадки космического летательного аппарата или спускаемого аппарата. Таким образом, в модель необходимо ввести функциональный блок Расчет параметров маневра посадки КЛА. Внутри этого блока модели выполняется расчет баллистических параметров для схода с орбиты искусственного спутника малого тела и посадки КЛА, для этого используется скорректированное полетное задание, в частности, координаты точки посадки, полученные из функционального блока А2. Ограниченные возможности бортовых ресурсов требуют использовать в качестве механизма в данном блоке ЦУП. Целью и результатом функционирования данного блока, являются Уточненная траектория КЛА.
Функциональный блок «Наведение и посадка КЛА» описывает процедуру автономного наведения и посадки КЛА. Посадка КЛА выполняется с использованием координат точки посадки, полученных в результате выполнения функционального блока А4, в качестве управления используется скорректированное полетное задание, а в качестве механизма используются БКНП и основные устройства обеспечения наведения и посадки – Оптический пеленгатор и Высотомер.После посадки бортовой комплекс определяет истинное положение и ориентацию аппарата на поверхности исследуемого тела. Полученные данные включатся в отчет о посадке КЛА, который какрезультат функционирования блока и в целом всего процесса передается на Землю для анализа и уточнения задач миссии. Приведем диаграммы процессов, происходящих в функциональных блоках, приведенных выше.
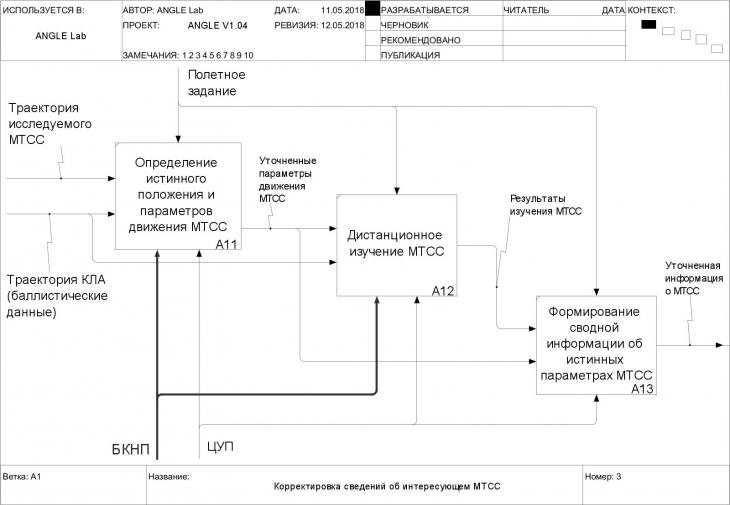
Рисунок 3. Диаграмма декомпозиции функционального блока А1.
На диаграмме А1 Корректировка сведений об интересующем небесном теле. (Рисунок 3) рассмотрена декомпозиция функционального блока А1. Исходя их анализа предметной области и детального уточнения выполняемых задач ИС, были определенны следующие функциональные элементы:
· Определение истинного положения и параметров движения малого тела солнечной системы;
· Дистанционное изучение МТСС (включая определение истинного размера малого тела солнечной системы;
· Формирование сводной информации об истинных параметрах малого тела солнечной системы;
Первым процессом является определение истинного положения и параметров движения малого тела солнечной системы. Данный блок использует параметры траектории движения малого тела солнечной системы, которые известны из наземных наблюдений и заложены в память бортового комплекса наведения и посадки специалистами команды миссии. В качестве управления используется полетное задание, описывающее алгоритм выполнения этих действий, а в качестве механизма ЦУП и БКНП, включая такие устройства, как фотокамеры, звездные датчики, инерциальные датчики и вычислительные средства на борту КЛА. Результатом функционирования является уточненные параметры движения малого тела солнечной системы.
Следующий этап – дистанционное изучение МТСС. В этом функциональном блоке выполняются процедуры по определению свойств МТСС, необходимых для расчета параметров маневра КЛА, для сближения и фотосъемки поверхности, с целью поиска места посадки. Для определения размеров, формы, массы, плотности, собственного возмущенного движения и других важных параметров на входе в блок, используются уточненные параметры движения МТСС, а также данные о траектории КЛА, в качестве управления используется полетное задание, а в качестве механизма Бортовой комплекс наведения и посадки и центру управления полетами (ЦУП), где обрабатываются данные, которые не могут быть обработаны БКНП. На выходе из блока получаем данные результаты изучения МТСС, которые вместе с уточненными параметрами движения МТСС направляются на вход следующего блока – Формирование сводной информации об истинных параметрах МТСС. Управляющим воздействием в данном блоке выступает полетное задание. Многие из процедур и алгоритмов этого функционального блока весьма сложны и требуют использования производительных средств вычисления, которых нет в составе БКНП, поэтому в качестве формального механизма блока используется ЦУП. В результате формируется сводная информация об исследуемом МТСС. Результатом функционирования является уточненная информация об исследуемом малом теле солнечной системы, включая параметры, необходимые для расчета параметров траектории КЛА для дальнейшего детального изучения МТСС. Эта информация является входящей в информационном блоке А2.
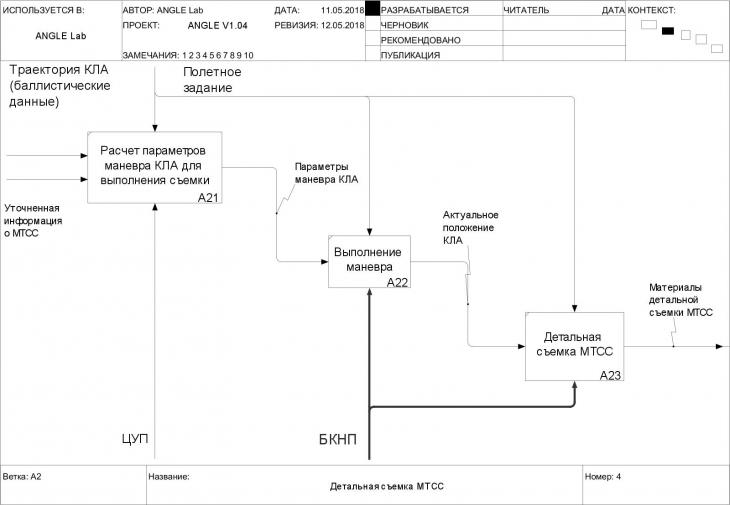
Рисунок 4. Диаграмма декомпозиции функционального блока А2. IDEF0.
На диаграмме декомпозиции уровня А2 (Рисунок 4), рассматривается процесс выполнения детальной съемки МТСС. На основании анализа предметной области определенны следующие функциональные блоки:
- Расчет параметров маневра КЛА для выполнения съемки;
- Выполнение маневра;
- Детальная съемка МТСС
Для выполнения фотосъемки изучаемого тела, КЛА необходимо изменить свое положение совершив маневр таким образом, чтобы выполнить фотографирование, а также изучение другими приборами, всей поверхности изучаемого малого тела солнечной системы. Параметры маневра необходимо рассчитать до выполнения маневра КЛА.
Первый процесс протекающий на диаграмме декомпозиции А2 – Расчет параметров маневра КЛА для выполнения съемки. Данный функциональный блок использует параметры траектории КЛА и уточненную информацию о МТСС и траектории его движения. В качестве механизма используется центр управления полетами, поскольку такие ответственные задачи должны быть подтверждены с Земли, в качестве управления – полетное задание. Целью и результатом функционирования является параметры маневра КЛА, как часть скорректированного полетного задания и траектория маневра КЛА для фотографирования МТСС.
Следующим этапом необходимо выполнить маневр на основании скорректированного полетного задания и полученных расчетных параметров траектории КЛА для фотографирования МТСС. Соответственно в качестве связи по входу используется параметры маневра, в качестве управления –полетное задание, в качестве механизма – БКНП. Результатом функционирования является – актуальное положение КЛА.
Далее с использованием актуального положения КЛА, на основании полетного задания, выполняется процесс детальной фотосъемки МТСС. Механизмом является БКНП (фотокамера, звездные датчики, вычислительные и другие устройства, входящие в состав бортового комплекса). Результатом функционирования являются материалы детальной съемки МТСС, которые в свою очередь используются для работы функционального блока А3.
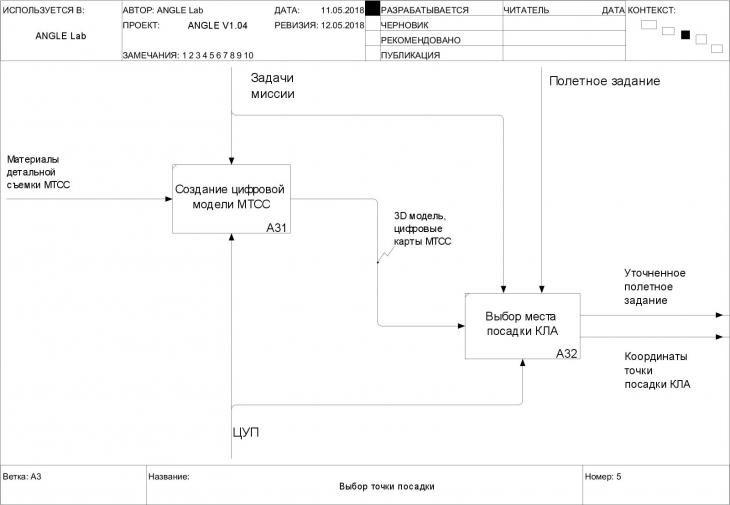
Рисунок 5. Диаграмма декомпозиции функционального блока А3. IDEF0.
На диаграмме декомпозиции уровня А3 (Рисунок 5) детально рассматривается процесс определения координат посадки. На основе анализа предметной области и детального описания этапов процесса посадки, были определенны следующие процессы, входящие в родительский процесс Выбор точки посадки:
· Создание цифровой модели МТСС;
· Выбор места посадки КЛА.
Первый активный процесс на диаграмме декомпозиции Выбор точки посадки – Создание цифровой модели, включая детализированную 3D модель и цифровые карты, изучаемого малого тела солнечной системы. Процесс функционирует, используя материалы детальной съёмки МТСС. Управлением является задачи миссии, а механизмом ЦУП. Результатом функционирования является 3D модель и цифровые карты МТСС, используемые в последующем процессе. Следующим этапом является выбор места посадки, данный процесс функционирует, используя полученную 3D модель и цифровые карты, возможно также использование одиночных снимков, из предыдущего функционального блока. Управление выбором точки посадки осуществляется в строгом соответствии с полетным заданием и задачами миссии. Выбор точки посадки – ответственная и сложная задача, так как одновременно нужно учитывать несколько факторов. БКНП, как правило, не располагает такими возможностями, поэтому в качестве механизма используется наземная команда миссии (ЦУП).
Блок А4 – Расчет параметров маневра КЛА при сходе с траектории искусственного спутника изучаемого малого тела и посадка на его поверхность, в рамках данного исследования, не требует дальнейшей декомпозиции, поскольку в этой процедуре БКНП не участвует. В силу ограниченных вычислительных ресурсов бортового комплекса, а также высокой ответственности, процесс выполняется на Земле, учеными входящими в команду миссии (механизм реализации – ЦУП). На вход функции подается информацию о текущей траектории КЛА и координаты точки посадки на поверхность МТСС. Блок функционирует в соответствии с задачами мисси и уточненным полетным заданием, которое корректируется после определения координат основной и резервных точек посадки. Задачи миссии и уточненное полетное задание выступают в роли управления данным блоком. На выходе из блока формируется уточненная траектория КЛА, которая является входящим потоком в блок А5 Наведение и посадка КЛА.
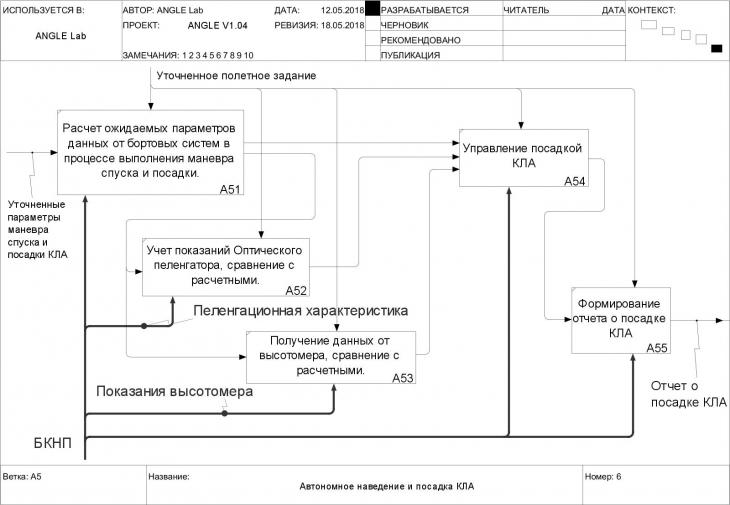
Рисунок 6. Диаграмма декомпозиции функционального блока А5 Автономное наведение и посадка КЛА. IDEF0.
Заключительным и самым главным этапом работы БКНП, является наведение и посадка КЛА, рассмотрим декомпозицию этого функционального блока (Рисунок 6).
Были определены следующие функциональные элементы:
· Расчет ожидаемых параметров данных от бортовых систем в процессе выполнения маневра спуска и посадки;
· Учет показаний оптического пеленгатора, сравнение с расчетными;
· Получение данных от высотомера, сравнение с расчетными;
· Управление посадкой КЛА;
· Формирование отчета о посадке КЛА.
Первым этапом происходит указание параметров маневра и координат точки посадки, после чего происходит вычисление ожадаемых значений показаний бортовых устройств, входящих в Бортовой комплекс наведения и посадки КЛА, что выполняет функциональный блок «Расчет ожидаемых параметров данных от бортовых систем в процессе выполнения маневра спуска и посадки», использующий уточненные параметры маневра спуска и посадки КЛА, в качестве входящей информации. Далее начинают использоваться следующие функциональные блоки. Блок Учет показаний оптического пеленгатора, а при сближении с МТСС и Получение данных от высотомера, использует координаты точки посадки на МТСС, пришедшие из функционального блока Указание координат точки посадки КЛА и параметров траектории схода с орбиты ИС МТСС. В качестве механизма используется Высотомер, входящий в БКНП, в качестве управления уточненное полетное задание. Результатом функционирования являются показания высотомера (расстояние от КЛА до поверхности МТСС). Данные пришедшие с этих блоков сравниваются с расчетными значениями и выполняется корректировка траектории спуска КЛА, которая выполняется в следующем функциональном блоке А54.
Блок Учет показаний оптического пеленгатора, использует поток управляющих команд от оптического корреляционного пеленгатора для коррекции двигателями траектории в процессе маневра КЛА при сходе с орбиты искусственного спутника и посадки на малое тело, пришедший от функционального блока Выбор точки посадки. В качестве механизма используется оптический пеленгатор, входящий в БКНП, в качестве управления уточненное полетное задание. Результатом функционирования являются показания оптического пеленгатора. Данные пеленгатора и высотомера поступают на вход следующего блока – Корректировка траектории посадки. Корректировка траектории посадки выполняется в следующем блоке в соответствии с показаниями специального оборудования, входящего в состав БКНП. Функциональный блок Корректировка траектории посадки, работает используя в качестве вводных данных показания высотомера и показания оптического коррелятора, полученные из предыдущих функциональных блоков. В этом блоке данные от этих устройств сравниваются с расчётными параметрами. В случае отклонения выполняется корректировка траектории спуска и посадки КЛА. Управление – уточненное полетное задание, механизм БКНП КЛА. Цель и результат функционирования, скорректированная траектории посадки.
Далее происходит посадка КЛА по скорректированной траекторией. После выполнения процесса посадки КЛА в соответствии с скорректированной траекторией, производится формирование отчета о посадке КЛА, используя в виде вводных данных координаты точки посадки и сведения о процессе посадке. Связь по управлению – скорректированные показатели траектории посадки, связь по управлению – БКНП КЛА. В качестве результата функционирования получаем Отчет о посадке КЛА, которая в свою очередь является граничной стрелкой по выходу всей модели посадки космического летательного аппарата на поверхность малого тела солнечной системы.
Обсуждение полученных результатов.
В работе достигнута основная цель, поставленная авторами – сформулированы основные требования к работе бортового комплекса КЛА. На основании этих требований построена прикладная функциональная модель «to-be» бортового комплекса наведения и посадки космического летательного аппарата на малые тела солнечной системы в нотации IDEF0. Модель построена с использованием комплексного подхода к процедуре наведения и посадки КЛА. Формализованы процедуры, входящие в функциональную модель БКНП наведения и посадки КЛА на малые тела солнечной системы. Предложенный подход ориентирован на совместное использование данных от всех бортовых устройств, как основной и дублирующей информации, что позволит повысить точность и надежность процедуры посадки КЛА на малые тела солнечной системы. Увеличение точности авторы статьи предполагают достичь, используя оптический корреляционный пеленгатор, для наведения КЛА в процессе посадки. Повышение надежности процедуры спуска и посадки предполагается осуществить посредствам использования многофункционального бортового комплекса наведения и навигации.
Изучение малого тела солнечной системы и посадка КЛА на его поверхность функционально представлены в статье диаграммой верхнего уровня А–0 (рисунок 1). В качестве инструментов авторы используют только БКНП и ЦУП, которые представляют собой необходимый и достаточный набор инструментов. Каждая группа инструментов разделена по способу базирования, на наземный и бортовой блоки, что на взгляд авторов соответствует концепции модели. В процессе декомпозиции основной процесс разделен на пять подпроцессов (рисунок 2, диаграмма А0). Отметим, что наземные службы (ЦУП), как инструмент решено было ввести в четыре функциональных блока, где обеспечивается решение важных и ответственных ресурсоемких задач, которые не могут быть обработаны бортовым вычислительным комплексом. Процесс автономного наведения и посадки КЛА, согласно концепции публикуемой работы, в качестве механизма использует только БКНП, поскольку отсутствует техническая возможность использования ЦУП, как инструмента [8,20,21]. Особо отмечается, что результат исполнения трех функциональных блоков (А1, А2 и А3) сопровождается изменением полетного задания, а управление блоками А4 и А5 осуществляется на основе нового инструмента управления – уточненного полетного задания. После определения параметров движения и гравитационных характеристики МТСС рассчитывается и выполняется маневр перехода КЛА на «орбиту» искусственного спутника малого тела – блок А21, диаграммы на рисунке 4. В процессе выполнения маневра КЛА собираются данные об изучаемом МТСС, включая пространственную информацию, результатом обработки которой должно стать создание цифровой модели МТСС, включающей трехмерная модель малого тела (объекта посадки), фотографические изображения с высоким пространственным разрешением, цифровые карты и фотокарты, модель строения МТСС и другие материалы, связанные с топографией и морфологией, необходимые для выбора места посадки. маневра спуска и посадки (блок А51 на рисунке 6). Коррекцию спуска и посадки (блок А54, рисунок 6) осуществляет БКНП, используя данные получаемые от оптического пеленгатора и высотомера. При этом сравниваются текущие показания с расчетными из блока А51. Работа блока А54 заканчивается в момент касания поверхности МТСС.
Существенной особенностью предложенной модели является использование в качестве инструмента оптического пеленгатора. Из диаграммы уровня А5 «Наведение и посадка КЛА» (рисунок 6) следует, что использование оптического пеленгатора позволит не только корректировать направление спуска КЛА, но и продублировать показания высотомера, резервируя процесс и повышая надежность.
В развитии полученных результатов, целесообразно построить структуру интегральной обработки данных от всех устройств, с целью дальнейшего повышения надежности работы бортового комплекса. Другой актуальной, на взгляд авторов, задачей является обеспечение геометрических параметров точности наведения в процессе схода с «орбиты» искусственного спутника и посадки КЛА на изучаемое малое тело.
References
1. William Napier. Hazards from comets and asteroids, Oxford University Press, 2008. 289 p.
2. Medvedev Yu.D., Sveshnikov M.L., Sokol'skii A.G. i dr. Asteroidno-kommetnaya opasnost'.-SPb.: Izd-vo ITA-MIPAO, 1996. – 244s.
3. Burkov V.D., Esakov V.A., Kufal' G.E. i dr. Problema protivodeistviya asteroidnoi opasnosti kosmicheskimi sredstvami. //Lesnoi vestnik. 2011. № 5. S.157 – 169.
4. Eismont N. A., Boyarskii M. N., Ledkov A. A., Nazirov R. R., Dankhem D., Shustov B. M.. O vozmozhnosti navedeniya malykh asteroidov na opasnye nebesnye ob''ekty s ispol'zovanie gravitatsionnogo manevra // Astronomicheskii vestnik, 2013, tom 47, № 4, S. 1–9.
5. Gehrels T (Ed), Hazards due to Comets and Asteroids, University of Arizona Press, 1994. 211 p.
6. Coppinger R. NASA plans 'Armageddon' spacecraft to blast asteroid [Elektronnyi resurs] // FlightGlobal. – 2007. – Rezhim dostupa: https://www.flightglobal.com/news/articles/nasa-plans-armageddon-spacecraft-to-blast-asteroid-215924/ – (data obrashcheniya 18.12.2017).
7. Kuznetsov Yu. M., Kulagin V. P., Obolyaeva N. M., Kaperko A. F., Shustov B., Naroenkov S., Bober S. A. Metody i sredstva informatsionno-analiticheskoi otsenki asteroidno-kometnoi opasnosti // Vestnik FGUP NPO im. S.A. Lavochkina. 2015. № 4 (30). S. 9-15.
8. Bogolyubov I.A., Lobanov A.A., Filonov A.S. Primenenie opticheskogo pelengatora dlya tselei posadki kosmicheskogo letatel'nogo apparata na malye tela solnechnoi sistemy // Nauchnyi al'manakh. – 2017. – №5-3(31). – S.45-48.
9. J. Veverka, et al, The landing of the NEAR-Shoemaker spacecraft on asteroid 433 Eros, Nature, 413: 390–393pp, 2001.
10. R.L. Nelson, et al, 433 Eros landing – development of NEAR Shoemaker’s controlled descent sequence, in Proceedings of 15th Annual AIAA/USU Conference on Small Satellites, 2001, SSC 01-11.
11. W.F. Robert, W. D. David, and V. M. James, NEAR Shoemaker at Eros: rendezvous, orbital operations, and a soft landing, in Proceedings of AAS Astrodynamics Specialists Conference, 2001, AAS Paper 01-370.
12. Starek J.A., Açıkmeşe B., Nesnas I.A., Pavone M. Spacecraft Autonomy Challenges for Next-Generation Space Missions. In: Feron E. (eds) Advances in Control System Technology for Aerospace Applications. Lecture Notes in Control and Information Sciences, 2016 vol 460. Springer, Berlin, Heidelberg. DOI https://doi.org/10.1007/978-3-662-47694-9_1. Publisher Name Springer, Berlin, Heidelberg. Print ISBN 978-3-662-47693-2.
13. P.G. Antreasian, et al, Preliminary considerations for NEAR’s low-altitude passes and landing operations at 433 Eros, in Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit, 1998, AIAA Paper 98-4397.
14. Y. Hajime, et al, Touchdown of the Hayabusa spacecraft at the Muses Sea on Itokawa, Science, 312: 1350-1353, 2006.
15. T. Kubota, et al, An autonomous navigation and guidance system for MUSES-C asteroid landing, Acta Astronautica, 52(2-6): 125–131, 2003.
16. H. Yano, et al, Touch-down of the Hayabusa spacecraft at the Muses Sea on Itokawa, Science, 312: 1350–1353, 2006.
17. S.B. Broschart, D.J. Scheeres, Control of hovering spacecraft near small bodies: application to asteroid 25143 Itokawa, Journal of Guidance, Control, and Dynamics, 28(2): 343–354, 2005.
18. P. Ferri, Mission operations for the new Rosetta, Acta Astronautica, 58(2): 105–111, 2006.
19. S. Ulameca, Rosetta lander–Philae: implications of an alternative mission, Acta Astronautica, 58(8): 435–441, 2006.
20. Dubov S.S., Zel'kov K.V., Konopikhin A.A., Krasnopevtseva B.V., Lobanov A.A., Rozhnev I.Yu., Shingareva K.B. Vybor poverkhnosti otnosimosti i sistemy koordinat dlya kartografo-geodezicheskogo obespecheniya posadki na Fobos KA «FOBOS-GRUNT» // Prilozhenie k zhurnalu Izvestiya vuzov. Geodeziya i aerofotos''emka. Sbornik statei po itogam nauchno-tekhnicheskoi konferentsii. 2009. № 2-2. S. 98-101.
21. Lobanov A.A., Filonov A.S. Metod opticheskoi obrabotki prostranstvennoi informatsii dlya tselei navedeniya i posadki kosmicheskikh letatel'nykh apparatov na malye tela solnechnoi sistemy. // Kibernetika i programmirovanie. – 2018. – № 2. – S.94-102
22. R 50.1.028-2001. Metodologiya funktsional'nogo modelirovaniya. Informatsionnye tekhnologii podderzhki zhiznennogo tsikla produktsii. — Vved. 2002-01-01. — M.: Izd-vo standartov, 2000. — 75 s.
|












