Electronics and Machinery
Reference:
Gubanova A.A., Guzarevich A.S., Taridonov N.E.
Distance measurement unit of search robot control system
// Electronics and Machinery.
2018. ą 1.
P. 27-31.
DOI: 10.7256/2453-8884.2018.1.25764 URL: https://en.nbpublish.com/library_read_article.php?id=25764
Distance measurement unit of search robot control system
Gubanova Aleksandra Anatol'evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, Gagarina, 1

|
anatoliya81@mail.ru
|
|
 |
Other publications by this author
|
|
Guzarevich Aleksandra Sergeevna
.
344000, Russia, Rostovskaya oblast', g. Rostov-na-Donu, Gagarina, 1
|
|
anatoliya81@mail.ru
|
|
 |
Other publications by this author
|
|
|
Taridonov Nikita Evgen'evich
.
344000, Russia, Rostovskaya oblast', g. Rostov-na-Donu, Gagarina, 1
|
|
anatoliya81@mail.ru
|
|
|
Other publications by this author
|
|
|
DOI: 10.7256/2453-8884.2018.1.25764
Received:
18-03-2018
Published:
28-03-2018
Abstract:
Solving the problem of determining the distance in the autonomous navigation system of a mobile robotic system is of great practical importance. For autonomous movement the robot must have a navigation system whose measurements prevent it from collisions with various obstacles. This paper demonstrates the control system of the distance measurement unit of the search robot. In practice, different kinds of robotic systems tend to move chaotically. For the organization of autonomous movement of the mobile robot it is necessary to equip it with measuring sensors and an intelligent processing system that prevents the robot from colliding with obstacles. The article deals with the principle based on the analysis of measurement results by ultrasonic distance sensor from the robot (sensor) to the front of the obstacle both in a static position and in the process of robot movement. The novelty of the paper lies in the fact that presence of an obstacle in the direction of the robot’s motion is determined by the time of the arrival of the reflected radio pulse emitted and received by the sensor in the ultrasonic frequency range. The project contains structural, functional and principal schematics. This research might provide increased precision and speed during indoor search and rescue operations. Other areas of mobile robotic systems application include mapping, protection of the premises and indoor service activities (cleaning, movement of goods), etc.
Keywords:
navigation, the control of the movement, controller, mobile robot, the distance to the obstacle, ultrasonic receiver, signal reflection, interrupts of microprocessor, emitter, receiver
 ďđîöĺńńĺ äâčćĺíč˙ đîáîňŕ äŕň÷čę č čçěĺđčňĺëüíŕ˙ ńčńňĺěŕ íĺďđĺđűâíî îńóůĺńňâë˙ţň čçěĺđĺíčĺ đŕńńňî˙íč˙ äî âďĺđĺäč ńňî˙ůĺăî ďđĺď˙ňńňâč˙. Ďđč äîńňčćĺíčč ěčíčěŕëüíî äîďóńňčěîăî ďîđîăîâîăî çíŕ÷ĺíč˙ (300 ěě) îň đîáîňŕ äî ďđĺď˙ňńňâč˙ đîáîň îńňŕíŕâëčâŕĺňń˙ č ďđîčçâîäčň çŕěĺđ đŕńńňî˙íč˙ ńëĺâŕ č ńďđŕâŕ. Ĺńëč đŕńńňî˙íčĺ ńëĺâŕ îęŕçűâŕĺňń˙ áîëüřĺ, ÷ĺě ńďđŕâŕ, đîáîň äâčćĺňń˙ â íŕďđŕâëĺíčč íŕčáîëüřĺăî çŕďŕńŕ äâčćĺíč˙ (íŕëĺâî). Ďđč îňńóňńňâčč áĺńďđĺď˙ňńňâĺííűő íŕďđŕâëĺíčé äâčćĺíč˙ îńóůĺńňâë˙ĺňń˙ îńňŕíîâęŕ đîáîňŕ č äâčćĺíčĺ đîáîňŕ â îáđŕňíóţ ńňîđîíó. Čçěĺđĺíčĺ đŕńńňî˙íč˙ ńëĺâŕ č ńďđŕâŕ îň đîáîňŕ ńîďđîâîćäŕĺňń˙ âđŕůĺíčĺě ďî ęđóăó ĺäčíč÷íîăî äŕň÷čęŕ.
Ďëŕíčđóĺňń˙, ÷ňî ÁČĐ áóäĺň âűďîëíĺí â âčäĺ ďëŕňű đŕńřčđĺíč˙ č áóäĺň îáĺńďĺ÷čâŕňü:
- Îňďđŕâęŕ óëüňđŕçâóęîâîăî ńčăíŕëŕ ďîä çŕäŕííűě óăëîě;
- Ďđčĺě îňđŕćĺííîăî óëüňđŕçâóęîâîăî ńčăíŕëŕ č čçěĺđĺíčĺ đŕńńňî˙íč˙ äî ďđĺăđŕäű.
Ńňđóęňóđíŕ˙ ńőĺěŕ (đčńóíîę 1) äŕ¸ň íŕčáîëĺĺ íŕăë˙äíîĺ ďđĺäńňŕâëĺíčĺ î ďîńëĺäîâŕňĺëüíîńňč âçŕčěîäĺéńňâč˙ ôóíęöčîíŕëüíűő ÷ŕńňĺé ďîčńęîâîăî đîáîňŕ.
Đčńóíîę 1 – Ńňđóęňóđíŕ˙ ńőĺěŕ áëîęŕ čçěĺđĺíč˙ đŕńńňî˙íč˙
 ńîńňŕâ ÁČĐ âőîä˙ň ńëĺäóţůčĺ ěîäóëč:
1. Ěčęđîďđîöĺńńîđíűé ěîäóëü (ěčęđîęîíňđîëëĺđ ńĺđčč MCS-51);
2. Áëîę ńîăëŕńîâŕíč˙ ń řčíîé RPI. Ďđĺäíŕçíŕ÷ĺí äë˙ ęîđđĺęňíîăî ôóíęöčîíčđîâŕíč˙ ńčńňĺěű îđčĺíňŕöčč ń îńňŕëüíűěč ěîäóë˙ěč đîáîňŕ;
3. Óëüňđŕçâóęîâîé čçëó÷ŕňĺëü (ÓÇČ), ďđĺäíŕçíŕ÷ĺííűé, äë˙ âîçáóćäĺíč˙ ÓÇ ęîëĺáŕíčé â íŕďđŕâëĺíčč ďđĺäďîëŕăŕĺěîăî ďđĺď˙ňńňâč˙;
4. Óëüňđŕçâóęîâîé ďđč¸ěíčę (ÓÇĎ), îńóůĺńňâë˙ţůčé, ďđč¸ě îňđŕćĺííűő îň ďđĺď˙ňńňâč˙ ęîëĺáŕíčé;
5. Áëîę îđăŕíčçŕöčč ďđĺđűâŕíčé. Ďîçâîë˙ĺň óâĺëč÷čňü ęîëč÷ĺńňâî îáúĺęňîâ ńďîńîáíűő ďđĺđâŕňü đŕáîňó ěčęđîďđîöĺńńîđŕ.
Ěčęđîďđîöĺńńîđ ˙âë˙ĺňń˙ îńíîâíűě óďđŕâë˙ţůčě ěîäóëĺě ńčńňĺěű îđčĺíňŕöčč (ŃÎ), Îí ôóíęöčîíčđóĺň ńîăëŕńíî ďđîăđŕěěĺ óďđŕâëĺíč˙ ĐĎ, çŕëîćĺííîé â ĎÇÓ. Ěîäóëč ÓÇČ č ÓÇĎ čăđŕţň íĺ ďîńëĺäíţţ đîëü â đŕáîňĺ íĺ ňîëüęî ŃÎ, íî č âńĺăî đîáîňŕ â öĺëîě. Îň íčő çŕâčńčň ňî÷íîńňü îďđĺäĺëĺíč˙ đŕńńňî˙íč˙.
Ďî ęîěŕíäĺ óďđŕâë˙ţůĺé ďđîăđŕěěű ěčęđîďđîöĺńńîđ ŕęňčâčđóĺň óëüňđŕçâóęîâîé čçëó÷ŕňĺëü (ÓÇČ) č çŕďóńęŕĺň âíóňđĺííčé ń÷ĺň÷čę. Îňđŕćĺííűé ńčăíŕë ôčęńčđóĺňń˙ óëüňđŕçâóęîâűě ďđčĺěíčęîě č âűçűâŕĺň ďđĺđűâŕíčĺ ó ěčęđîďđîöĺńńîđŕ. Ń÷ĺň÷čę îńňŕíŕâëčâŕĺňń˙, č ďî ĺăî çíŕ÷ĺíčţ âű÷čńë˙ĺňń˙ đŕńńňî˙íčĺ äî ďđĺăđŕäű îň ęîňîđîé ďđîčçîřëî îňđŕćĺíčĺ óëüňđŕçâóęŕ. Ýňî çíŕ÷ĺíčĺ ďĺđĺäŕĺňń˙ â ńčńňĺěó óďđŕâëĺíč˙ äâčćĺíčĺě đîáîňŕ (ÁÓÄ), ęîňîđŕ˙ ďđîčçâîäčň ęîđđĺęňčđîâęó íŕďđŕâëĺíč˙ č/čëč ńęîđîńňč äâčćĺíč˙, ĺńëč ýňî íĺîáőîäčěî. Ďđč ńđŕáŕňűâŕíčč ňîăî čëč číîăî äŕň÷čęŕ ěîćíî îöĺíčâŕňü ńčňóŕöčţ ńëîćčâřóţń˙ âîęđóă đîáîňŕ.
Îďčńŕíčĺ ďđčíöčďčŕëüíîé ýëĺęňđč÷ĺńęîé ńőĺěű. Íŕ ďđčíöčďčŕëüíîé ýëĺęňđč÷ĺńęîé ńőĺěĺ ÁČĐ (đčńóíîę 2) îńíîâíűě ýëĺěĺíňîě ˙âë˙ĺňń˙ ěčęđîęîíňđîëëĺđ DD3, ęîňîđűé âűďîëí˙ĺň ďđîăđŕěěó, íŕőîä˙ůóţń˙ â ĎÇÓ.  ďđîöĺńńĺ âűďîëíĺíč˙ ďđîăđŕěěű ěčęđîęîíňđîëëĺđ âűäŕĺň íŕ ďîđň P2.7 âűńîęčé óđîâĺíü ńčăíŕëŕ (ëîăč÷ĺńęŕ˙ ĺäčíčöŕ), ęîňîđŕ˙ îňęđűâŕĺň ęëţ÷ DD4.1. Ýňî îçíŕ÷ŕĺň, ÷ňî âęëţ÷¸í óëüňđŕçâóęîâîé čçëó÷ŕňĺëü č ăĺíĺđŕňîđ íŕ÷číŕĺň ôîđěčđîâŕňü ęîëĺáŕíč˙. Ďđč ýňîě, â ńŕěîě ĚĘ âęëţ÷ŕĺňń˙ ňŕéěĺđ, ęîňîđűé áóäĺň čçěĺđ˙ňü âđĺě˙ îň ďîńűëęč ńčăíŕëŕ äî ďđčĺěŕ ĺăî îňđŕćĺííîăî çíŕ÷ĺíč˙. Îí ďđîďóńęŕĺň ęîëĺáŕíč˙ ńôîđěčđîâŕííűĺ ăĺíĺđŕňîđîě, ęîňîđűé ńîáđŕí íŕ ýëĺěĺíňŕő DD2.1, DD2.2, C5 č R3.×ĺđĺç äčíŕěčę, ýňč ęîëĺáŕíč˙ ďĺđĺäŕţňń˙ âî âíĺříţţ ńđĺäó â âčäĺ óëüňđŕçâóęîâűő âîëí.
ŐÚ{}{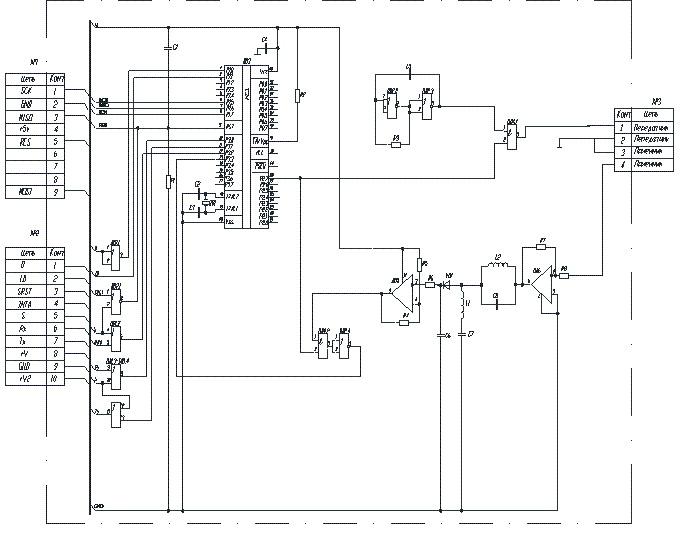
Đčńóíîę 2- Ńőĺěŕ ýëĺęňđč÷ĺńęŕ˙ ďđčíöčďčŕëüíŕ˙ ÁČĐ
Ěčęđîôîí, ďđčí˙â ęîëĺáŕíč˙ îň îňđŕć¸ííűő îáúĺęňîâ, ďĺđĺäŕĺň čő íŕ îďĺđŕöčîííűé óńčëčňĺëü DD6. Ďđîőîä˙ ÷ĺđĺç ďîëîńîâîé ôčëüňđ, ńîáđŕííűé íŕ ýëĺěĺíňŕő L1, L2, C6 č C7, ďđîďóńęŕĺňń˙ ëčřü ňŕ ÷ŕńňü óńčëĺííîăî ńčăíŕëŕ, ęîňîđŕ˙ ńîâďŕäŕĺň ń đĺçîíŕíńíîé ÷ŕńňîňîé ĎÔ. Ôčëüňđ íŕńňđîĺí íŕ ďđîďóńęŕíčĺ ęîëĺáŕíčé ÷ŕńňîňîé 42–45 ęĂö. Ňĺďĺđü íŕ âőîäĺ ęîěďŕđŕňîđŕ DD5 îäíîďîë˙đíűé (ńčăíŕë ďđîř¸ë ÷ĺđĺç äčîä VD1 â ďđ˙ěîě íŕďđŕâëĺíčč), îňôčëüňđîâŕííűé íŕ íóćíóţ ÷ŕńňîňó ńčăíŕë, ęîňîđűé ňĺďĺđü ńđŕâíčâŕĺňń˙ ń ěčíčěŕëüíűě ďîđîăîě ńđŕáŕňűâŕíč˙ óëüňđŕçâóęîâîăî ďđč¸ěíčęŕ. Ýňîň ďîđîă çŕäŕ¸ňń˙ ďîäáîđîě đĺçčńňîđŕ R4.
Ńčăíŕë âęëţ÷ĺíč˙ ÓÇĎ ďîďŕäŕĺň ń âűőîäŕ P2.7 (ëîăč÷ĺńęŕ˙ ĺäčíčöŕ) ďîďŕäŕĺň íŕ âőîä DD4.2, ęîňîđűé ďđč îňńóňńňâčč ńđŕâíĺíč˙ íŕ ęîěďŕđŕňîđĺ DD6 (ëîăč÷ĺńęčé íîëü) âűäŕ¸ň «0», ďđč číâĺđňčđîâŕíčč ęîňîđîăî íŕ âőîä INT1 (P3.3) ěčęđîęîíňđîëëĺđŕ ďîäŕĺňń˙ íĺŕęňčâíűé ĺäčíč÷íűé ńčăíŕë. Îäíŕęî, ęîăäŕ ęîěďŕđŕňîđ ďîńëĺ ńđŕâíĺíč˙ ďîäŕĺň íŕ âőîä DD4.2 ëîăč÷ĺńęóţ ĺäčíčöó, íŕ âőîä INT1 ďđčőîäčň «0» č ň.î. ôîđěčđóĺňń˙ ńđĺç ńčăíŕëŕ (ďĺđĺőîä čç ĺäčíč÷íîăî ńîńňî˙íč˙ â íóëĺâîĺ). Ďđč ńđŕáŕňűâŕíčč ďđĺđűâŕíč˙, â ěčęđîęîíňđîëëĺđĺ âűçűâŕĺňń˙ ďđîöĺäóđŕ îáđŕáîňęč ýňîăî ďđĺđűâŕíč˙, âűęëţ÷ŕĺňń˙ ňŕéěĺđ č, íŕ îńíîâŕíčč ĺăî çíŕ÷ĺíč˙, âű÷čńë˙ĺňń˙ đŕńńňî˙íčĺ äî ďđĺď˙ňńňâč˙.
 őîäĺ đŕáîňű áűë đŕçđŕáîňŕí áëîę čçěĺđĺíč˙ đŕńńňî˙íčé ńčńňĺěű óďđŕâëĺíč˙ ďîčńęîâűě đîáîňîě.  ďđîĺęňĺ ďđĺäńňŕâëĺíű ńňđóęňóđíŕ˙, ôóíęöčîíŕëüíŕ˙ č ďđčíöčďčŕëüíŕ˙ ńőĺěű. Äŕííŕ˙ đŕçđŕáîňęŕ ďîçâîëčň ń áîëüřĺé ňî÷íîńňüţ č ńęîđîńňüţ îáńëĺäîâŕňü ďîěĺůĺíč˙ â ďîčńęŕő îďŕńíűő ďđĺäěĺňîâ čëč ďîńňđŕäŕâřčő ëţäĺé, ÷ňî ďîçâîëčň óěĺíüřčňü âĺđî˙ňíîńňü čő ăčáĺëč. Ęđîěĺ ňîăî, âîçěîćíű äđóăčĺ ńôĺđű ďđčěĺíĺíč˙ ńčńňĺěű ěîáčëüíűő đîáîňîâ: ęŕđňîăđŕôčđîâŕíčĺ, îőđŕíŕ ďîěĺůĺíčé, âűďîëíĺíčĺ âńďîěîăŕňĺëüíűő đŕáîň â çäŕíčč (óáîđęŕ, ďĺđĺěĺůĺíčĺ ăđóçîâ) č ň.ď.
References
1. Osnovy robototekhniki : ucheb. posobie / A.A. Ivanov. — 2-e izd., ispr. — M. : INFRA-M, 2017. — 223 s.
2. Vestnik Donskogo gosudarstvennogo tekhnicheskogo universiteta, 2013, ą7/8 (75) / Vestnik Donskogo gosudarstvennogo tekhnicheskogo universiteta, ą7/8 (75), 2013
3. Avtomaticheskie sistemy transportnykh sredstv: Uchebnik / V.V. Belyakov, D.V. Zezyulin, V.S. Makarov, A.V. Tumasov.-M.: Forum: NITs INFRA-M, 2015.-352 s.
4. Proektirovanie avtomatizirovannykh sistem proizvodstva: Uchebnoe posobie / V.L. Konyukh.-M.: KURS: NITs INFRA-M, 2014.-312 s.
|