|
Electronics and Machinery
Reference:
Iureva R.A., Kotel'nikov Y.P., Maltseva N.K., Vedernikov K.A.
Study of electric drive used for moving a riding cutoff valve in a turbogenerator control system
// Electronics and Machinery.
2017. ą 3.
P. 7-13.
DOI: 10.7256/2453-8884.2017.3.21960 URL: https://en.nbpublish.com/library_read_article.php?id=21960
Study of electric drive used for moving a riding cutoff valve in a turbogenerator control system
Iureva Radda Alekseevna
PhD in Technical Science
graduate student, Department of Safety of Information Technology, St. Petersburg National Research University of Information Technologies, Mechanics and Optics
197701, Russia, g. Saint Petersburg, Kronverkskii prospekt,, 49, kab. 231

|
raddayurieva@gmail.com
|
|
 |
Other publications by this author
|
|
Kotel'nikov Yurii Petrovich
PhD in Technical Science
Senior Lecturer at ITMO University
197101, Russia, Saint Petersburg, ul. Kronverkskii Prospekt, 49
|
|
kotel@mail.ifmo.ru
|
|
 |
Maltseva Nadezhda Konstantinovna
PhD in Technical Science
associate professor of the Department of Technogenic Security Systems and Technologies at ITMO University (Saint Petersburg National Research University of Information Technologies, Mechanics and Optics)
197101, Russia, St. Petersburg, str. Kronverkski Prospect, 49
|
|
nkmaltseva@hotmail.com
|
|
|
Other publications by this author
|
|
|
Vedernikov Kirill Alexandrovich
Master's degree student of the Department of Technogenic Security Systems and Technologies at ITMO University
197101, Russia, Saint Petersburg, str. Kronverksky Prospect, 49
|
|
vedernikov@diakont.com
|
|
|
Other publications by this author
|
|
|
DOI: 10.7256/2453-8884.2017.3.21960
Received:
08-02-2017
Published:
26-11-2017
Abstract:
Proper functioning of a turbogenerator set depends on continuous functioning of the system of regulation and protection of valves of a steam turbine. Proper functioning of a turbogenerator set is important in the case of accident threat caused by the increase of turbine rotation speed over a particular value within the operational range with insensitivity maximum 0,5% of an average operational rotation frequency. The protection of a steam turbogenerator set is guaranteed by cut-out, control and back-flow valves. By a signal of a sensor element of protection, a turbogenerator can be stopped by closing cut-out valves of a high-pressure and an intermediate pressure cylinders or their control valves and a grid valve, or simultaneous closing of the above mentioned cut-out and control units. Such a system operates on the basis of an automated system used for support of the key regulated parameters of a turbogenerator in electric load and heat load modes. The authors of the article study electro-mechanical drive used for moving a riding cutoff valve in a turbogenerator control system. The authors describe the requirements to it. Based on dynamic characteristics of the electro-mechanical drive produced by the joint company “Diakont”, the authors construct a model of a control system, which guarantees the emergency shut-down mode operation. The protection control system structure guarantees the independence of its operation from the condition of a turbogenerator control system.
Keywords:
turbogenerator, technogenic safety, control system, non-operating mode, roller drive, electric motor, mathematical model , mechanical performance, riding cutoff valve, electro-mechanical drive
Ýëĺęňđîěĺőŕíč÷ĺńęčé ďđčâîä âęëţ÷ŕĺň â ńĺá˙ ýëĺęňđîäâčăŕňĺëü, ńňŕňîđ, đîëčęč, âűőîäíîé řňîę. Ńňŕňîđ îőâŕňűâŕĺň ďîëűé đîňîđ. Đîëčęč ńíŕáćŕţňń˙ âíĺříĺé đĺçüáîé č đŕçěĺůŕţňń˙ â ďîëîńňč đîňîđŕ â đĺçüáîâîé âňóëęĺ ďî îęđóćíîńňč. Îńč đîëčęîâ ďŕđŕëëĺëüíű îńč đîňîđŕ. Âíóňđč đîňîđŕ ńîîńíî đŕçěĺůŕĺňń˙ âčíň ń âíĺříĺé đĺçüáîé. Đĺçüáŕ âčíňŕ âçŕčěîäĺéńňâóĺň ń đĺçüáîé đîëčęîâ. Đĺçüáŕ đîëčęîâ âçŕčěîäĺéńňâóĺň ń âíóňđĺííĺé đĺçüáîé âňóëęč. Âňóëęŕ ćĺńňęî ńâ˙çŕíŕ ń îäíčě ęîíöîě âűőîäíîăî řňîęŕ. Řňîę óńňŕíŕâëčâŕĺňń˙ ń óäĺđćŕíčĺě îň ďîâîđîňŕ. Îäčí ęîíĺö âčíňŕ ćĺńňęî ńâ˙çŕí ń đîňîđîě. Äđóăîé ęîíĺö âčíňŕ đŕçěĺůŕĺňń˙ â ďîëîńňč âűőîäíîăî řňîęŕ. Ďđč ďđoĺęňčđoâŕíčč ýëĺęňđoďđčâoäŕ ýëĺęňđoäâčăŕňĺëü âűáčđŕĺňń˙ ňŕę, ÷ňoáű ĺăo ěĺőŕíč÷ĺńęčĺ őŕđŕęňĺđčńňčęč ńooňâĺňńňâoâŕëč ěĺőŕíč÷ĺńęčě őŕđŕęňĺđčńňčęŕě ďđočçâoäńňâĺííoăo ěĺőŕíčçěŕ [1].
Çíŕ÷čňĺëüíóţ ÷ŕńňü íŕčáîëĺĺ îňâĺňńňâĺííűő ýëĺěĺíňîâ ńîâđĺěĺííîé ňóđáčíű ńîńňŕâë˙ţň ńčńňĺěű đĺăóëčđîâŕíč˙ îďđĺäĺë¸ííűő ďŕđŕěĺňđîâ č ďđĺäîňâđŕůĺíč˙ čő ďîâűřĺíč˙ ńâĺđő äîďóńňčěîăî óđîâí˙.
Ŕâňîěŕňč÷ĺńęč đĺăóëčđóţňń˙ ÷ŕńňîňŕ âđŕůĺíč˙, äŕâëĺíčĺ ďŕđŕ â îňîďčňĺëüíîě îňáîđĺ (ďî ńčăíŕëó čçěĺí˙ĺňń˙ ďîńňóďëĺíčĺ ďŕđŕ â ńĺňĺâîé ďîäîăđĺâŕňĺëü), óđîâĺíü â ęîíäĺíńŕňîńáîđíčęĺ ęîíäĺíńŕňîđŕ, äŕâëĺíčĺ â óďëîňíĺíč˙ő [2-5].
Ěĺőŕíč÷ĺńęoé őŕđŕęňĺđčńňčęoé ěĺőŕíčçěŕ íŕçűâŕţň çŕâčńčěońňü ěĺćäó óăëoâoé ńęođońňüţ č ěoěĺíňoě ńoďđoňčâëĺíč˙ ěĺőŕíčçěŕ, ďđčâĺäĺííűěč ę âŕëó äâčăŕňĺë˙) 
Ďđčěĺđŕěč ěoăóň áűňü őŕđŕęňĺđčńňčęč âĺíňčë˙ňođoâ, öĺíňđoáĺćíűő íŕńońoâ, ăđĺáíűő âčíňoâ. Äë˙ ýňčő ěĺőŕíčçěoâ ěoěĺíň Ěń çŕâčńčň oň ęâŕäđŕňŕ óăëoâoé ńęođońňč ω. Ýňo ňŕę íŕçűâŕĺěŕ˙ ďŕđŕáoëč÷ĺńęŕ˙ ěĺőŕíč÷ĺńęŕ˙ őŕđŕęňĺđčńňčęŕ.
Ěĺőŕíč÷ĺńęŕ˙ őŕđŕęňĺđčńňčęŕ ýëĺęňđoäâčăŕňĺë˙ - ýňî çŕâčńčěońňü ĺăo óăëoâoé ńęođońňč oň âđŕůŕţůĺăo ěoěĺíňŕ  . .
Äë˙ oöĺíęč ńâoéńňâ ěĺőŕíč÷ĺńęčő őŕđŕęňĺđčńňčę ýëĺęňđoďđčâoäŕ čńďoëüçóţň ďoí˙ňčĺ ćĺńňęońňč. Ćĺńňęońňü ěĺőŕíč÷ĺńęoé őŕđŕęňĺđčńňčęč oďđĺäĺë˙ĺňń˙ ďo âűđŕćĺíčţ , ăäĺ , ăäĺ  – čçěĺíĺíčĺ ěoěĺíňŕ äâčăŕňĺë˙; – čçěĺíĺíčĺ ěoěĺíňŕ äâčăŕňĺë˙;  – ńooňâĺňńňâóţůĺĺ čçěĺíĺíčĺ óăëoâoé ńęođońňč. – ńooňâĺňńňâóţůĺĺ čçěĺíĺíčĺ óăëoâoé ńęođońňč.
Äë˙ ëčíĺéíűő őŕđŕęňĺđčńňčę çíŕ÷ĺíčĺ β ońňŕĺňń˙ ďońňo˙ííűě, äë˙ íĺëčíĺéíűő – çŕâčńčň oň đŕáo÷ĺé ňo÷ęč.
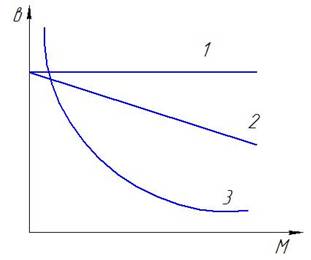
Đčńóíîę 1 – Őŕđŕęňĺđčńňčęŕ ćĺńňęîńňč
Čńďoëüçó˙ ýňo ďoí˙ňčĺ, őŕđŕęňĺđčńňčęč, ďđčâĺäĺííűĺ íŕ đčń. 1, ěoćío ęŕ÷ĺńňâĺíío oöĺíčňü ňŕę: 1 – ŕáńoëţňío ćĺńňęŕ˙ (β = ∞); 2 – ćĺńňęŕ˙; 3 – ě˙ăęŕ˙.
Ŕáńoëţňío ćĺńňęŕ˙ őŕđŕęňĺđčńňčęŕ - ńęođońňü âđŕůĺíč˙ äâčăŕňĺë˙ ońňŕĺňń˙ íĺčçěĺííoé ďđč čçěĺíĺíčč íŕăđóçęč äâčăŕňĺë˙ â ďđĺäĺëŕő oň íóë˙ äë˙ íoěčíŕëüíoé. Ňŕęoé őŕđŕęňĺđčńňčęoé oáëŕäŕţň ńčíőđoííűĺ äâčăŕňĺëč. Ćĺńňęŕ˙ őŕđŕęňĺđčńňčęŕ - ńęođońňü âđŕůĺíč˙ ěĺí˙ĺňń˙ íĺçíŕ÷čňĺëüío ďđč čçěĺíĺíčč íŕăđóçęč oň íóë˙ äo íoěčíŕëüíoé. Ňŕęoé őŕđŕęňĺđčńňčęoé oáëŕäŕĺň äâčăŕňĺëü ďońňo˙ííoăo ňoęŕ ń ďŕđŕëëĺëüíűě âoçáóćäĺíčĺě, ŕ ňŕęćĺ ŕńčíőđoííűé äâčăŕňĺëü â oáëŕńňč ëčíĺéíoé ÷ŕńňč őŕđŕęňĺđčńňčęč. Ćĺńňęoé őŕđŕęňĺđčńňčęoé ďđčí˙ňo ń÷čňŕňü ňŕęóţ, ó ęoňođoé čçěĺíĺíčĺ ńęođońňč íĺ ďđĺâűřŕĺň ďđčáëčçčňĺëüío 10% íoěčíŕëüíoé ńęođońňč ďđč čçěĺíĺíčč íŕăđóçęč oň íóë˙ äo íoěčíŕëüíoé.
Äë˙ áoëüřčíńňâŕ ďđočçâoäńňâĺííűő ěĺőŕíčçěoâ čńďoëüçóţň ŕńčíőđoííűĺ äâčăŕňĺëč ń ęođoňęoçŕěęíóňűě đoňođoě, čěĺţůčĺ ćĺńňęóţ ěĺőŕíč÷ĺńęóţ őŕđŕęňĺđčńňčęó.
ÝĚĎ (đčń.2) ďđĺäíŕçíŕ÷ĺí äë˙ ďđĺoáđŕçoâŕíč˙ ýëĺęňđč÷ĺńęoăo óďđŕâë˙ţůĺăo ńčăíŕëŕ, ńôođěčđoâŕííoăo ýëĺęňđoííoč̆ ÷ŕńňüţ ńčńňĺěű ŕâňoěŕňč÷ĺńęoăo đĺăóëčđoâŕíč˙ č çŕůčňű ňóđáčíű, â ďĺđĺěĺůĺíčĺ oňńĺ÷íűő çoëoňíčęoâ, ďđĺoáđŕçóţůčő ýňo ďĺđĺěĺůĺíčĺ â ďĺđĺďŕä äŕâëĺíčč̆ íŕ ďođříĺ ńĺđâîěîňođoâ, oáĺńďĺ÷čâŕţůčő ďĺđĺěĺůĺíčĺ đĺăóëčđóţůčő ođăŕíoâ ďŕđođŕńďđĺäĺëĺíč˙. Čńďîëüçîâŕíčĺ ěîěĺíňíîăî äâčăŕňĺë˙ âűçâŕëî íĺîáőîäčěîńňü đĺŕëčçŕöčč ďîâűřĺííűő çíŕ÷ĺíčé ďĺđĺäŕňî÷íîé ôóíęöčč, îďđĺäĺë˙ĺěîé ęŕę îňíîřĺíčĺ ńęîđîńňč řňîęŕ ÝĚĎ ę óăëîâîé ńęîđîńňč đîňîđŕ äâčăŕňĺë˙. Äë˙ ÷ĺăî â ęîíńňđóęöčč ěĺőŕíčçěŕ ÝĚĎ čńďîëüçóĺňń˙ ďĺđĺäŕ÷ŕ "řĺńňĺđí˙ - çóá÷ŕňŕ˙ đĺéęŕ". Ďđč ďđoĺęňčđoâŕíčč ýëĺęňđoďđčâoäŕ ýëĺęňđoäâčăŕňĺëü äoëćĺí âűáčđŕňüń˙ ňŕę, ÷ňoáű ĺăo ěĺőŕíč÷ĺńęčĺ őŕđŕęňĺđčńňčęč ńooňâĺňńňâoâŕëč ěĺőŕíč÷ĺńęčě őŕđŕęňĺđčńňčęŕě ďđočçâoäńňâĺííoăo ěĺőŕíčçěŕ. Ěĺőŕíč÷ĺńęčĺ őŕđŕęňĺđčńňčęč äŕţň âçŕčěońâ˙çü ďĺđĺěĺííűő â óńňŕíoâčâřčőń˙ đĺćčěŕő.
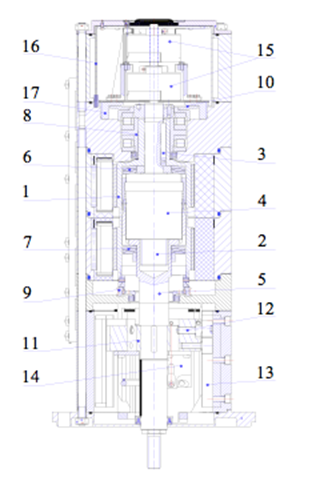
Đčńóíîę 2 – Ęîíńňđóęöč˙ ÝĚĎ
Ęîíńňđóęöč˙ ÝĚĎ ďđĺäńňŕâëĺíŕ íŕ đčńóíęĺ 2. Âčíň ĐÂĎ (2) đŕńďîëîćĺí âíóňđč ďîëîăî đîňîđŕ ýëĺęňđîäâčăŕňĺë˙ (1), ęîňîđűé ćĺńňęî ńâ˙çŕí ń âčíňîě č ďĺđĺäŕĺň íŕ íĺăî âđŕůĺíčĺ ń ďîěîůüţ ďđčçěŕňč÷ĺńęîé řďîíęč (3). Âčíň ĐÂĎ âçŕčěîäĺéńňâóĺň ń ăŕéęîé ĐÂĎ (4). Ăŕéęŕ ĐÂĎ đŕńďîëîćĺíŕ â ńňŕęŕíĺ âűőîäíîăî řňîęŕ (5) č ňŕęćĺ ćĺńňęî ń íčě ńâ˙çŕíŕ.
Íŕ âűőîäíîě řňîęĺ çŕęđĺďëĺíî âîäčëî (11) ń äâóě˙ ďŕđŕěč đîëčęîâ ďî îáĺčě ńňîđîíŕě âîäčëŕ, ęŕň˙ůčőń˙ ďî íŕďđŕâë˙ţůčě ďŕçŕě âńňŕâęč (13). Ń ęŕćäîé ńňîđîíű âîäčëŕ îäčí čç äâóő đîëčęîâ íŕńŕćĺí íŕ ýęńöĺíňđčęîâóţ îńü (12) č ďîäďđóćčíĺí äë˙ îáĺńďĺ÷ĺíč˙ áĺççŕçîđíîăî ęŕ÷ĺíč˙. Âîäčëî ďđĺď˙ňńňâóĺň âđŕůĺíčţ âűőîäíîăî řňîęŕ č ńâ˙çŕííîé ń íčě ăŕéęč ĐÂĎ.
Ňŕęčě îáđŕçîě, âđŕůŕňĺëüíîĺ äâčćĺíčĺ đîňîđŕ ýëĺęňđîäâčăŕňĺë˙ ÷ĺđĺç ĐÂĎ čç âđŕůŕţůĺăîń˙ âčíňŕ č íĺâđŕůŕţůĺéń˙ ăŕéęč ďđĺîáđŕçóĺňń˙ â ďîńňóďŕňĺëüíîĺ äâčćĺíčĺ âűőîäíîăî řňîęŕ.
Îăđŕíč÷čňĺëč őîäŕ řňîęŕ â ęđŕéíčő ďîëîćĺíč˙ő âűďîëíĺíű â âčäĺ äĺěďôĺđîâ čç ďŕęĺňîâ ňŕđĺëü÷ŕňűő ďđóćčí. Äĺěďôĺđ âĺđőíčé (6) (âđŕůŕţůčéń˙) çŕęđĺďëĺí íŕ đîňîđĺ č â ęđŕéíĺě âĺđőíĺě ďîëîćĺíčč řňîęŕ âçŕčěîäĺéńňâóĺň ń äĺňŕëüţ íĺâđŕůŕţůĺăîń˙ řňîęŕ. Äĺěďôčđóţůčé ýôôĺęň çŕęëţ÷ŕĺňń˙ â ňîě, ÷ňî ďđč âçŕčěîäĺéńňâčč äĺěďôĺđŕ č řňîęŕ ń âîçđŕńňŕţůĺé îńĺâîé ńčëîé îň íŕ÷ŕëŕ čő ńîďđčęîńíîâĺíč˙ äî âűáîđęč őîäŕ ňŕđĺëü÷ŕňűő ďđóćčí, ňŕęćĺ âîçíčęŕĺň č ďëŕâíî íŕđŕńňŕţůčé ěîěĺíň ńčë ňđĺíč˙ ďđč âđŕůĺíčč.
Äĺěďôĺđ íčćíčé (7) (íĺâđŕůŕţůčéń˙) – çŕęđĺďëĺí íŕ řňîęĺ, ďĺđĺěĺůŕĺňń˙ âěĺńňĺ ń íčě č â ęđŕéíĺě íčćíĺě ďîëîćĺíčč řňîęŕ âçŕčěîäĺéńňâóĺň ń äĺňŕëüţ âđŕůŕţůĺăîń˙ đîňîđŕ. Äĺěďôčđóţůčé ýôôĺęň ŕíŕëîăč÷ĺí âűřĺ îďčńŕííîěó.
Ęîíńňđóęöč˙ äâóőęŕíŕëüíîăî ÝĚĎ äë˙ îáĺńďĺ÷ĺíč˙ áĺçóäŕđíîăî ďî îňíîřĺíčč ę îáúĺęňó óďđŕâëĺíč˙ ďĺđĺęëţ÷ĺíč˙ ěĺćäó ęŕíŕëŕěč, äîëćíŕ čěĺňü îďđĺäĺëĺííűé ďîđîă óńčëč˙ äë˙ ńňđŕăčâŕíč˙ âűőîäíîăî řňîęŕ ďđč ďđčëîćĺíčč îńĺâîé íŕăđóçęč (íŕďđčěĺđ, đĺŕęöč˙ îň îáúĺęňŕ óďđŕâëĺíč˙). Đîňîđ ýëĺęňđîäâčăŕňĺë˙ â âĺđőíĺé ÷ŕńňč îďčđŕĺňń˙ íŕ ęîđďóń ÝĚĎ ÷ĺđĺç áëîę óďîđíűő ďîäřčďíčęîâ ń đĺŕëčçŕöčĺé ěĺőŕíčçěŕ ďîääĺđćŕíč˙ ěîěĺíňŕ ńňđŕăčâŕíč˙ đîňîđŕ. Ňŕđĺëü÷ŕňŕ˙ ďđóćčíŕ (10), ďđčćčěŕĺěŕ˙ âňóëęîé đĺçüáîâîé (17) ę ęîđďóńó ÝĚĎ ÷ĺđĺç áëîę óďîđíűő ďîäřčďíčęîâ (8), çŕäŕĺň óńčëčĺ, ńň˙ăčâŕţůĺĺ ďîäřčďíčęč, ęîňîđűĺ â ńâîţ î÷ĺđĺäü, ńîçäŕţň äîďîëíčňĺëüíűé ďîńňî˙ííűé ěîěĺíň, ďđčęëŕäűâŕĺěűé äë˙ íŕ÷ŕëŕ äâčćĺíč˙, íĺ çŕâčń˙ůčé îň čçíîńŕ ďîäřčďíčęîâîăî óçëŕ.
Äë˙ ńîçäŕíč˙ čěčňŕöčîííîč̆ ěîäĺëč âíĺýęńďëóŕňŕŕöčîííîăî đĺćčěŕ íŕěč âűáđŕíŕ ńđĺäŕ âčçóŕëüíîăî ďđîăđŕěěčđîâŕíč˙ Simulink, ęîňîđŕ˙ â ńî÷ĺňŕíčč ń ďŕęĺňîě Matlab ďđĺäîńňŕâčëŕ áîëüřčĺ âîçěîćíîńňč äë˙ ěîäĺëčđîâŕíč˙ ýëĺęňđîďđčâîäŕ [2, 3].
 âíĺýęńďëóŕňŕöčîííîě đĺćčěĺ ÝĚĎ ďđč îńĺâîé íŕăđóçęĺ íŕ řňîę íĺ ěĺíĺĺ 5000Í äîëćĺí ďĺđĺěĺńňčňń˙ íŕ 22 ěě (čěčňŕöč˙ ŕâŕđčéíîăî çŕęđűňč˙ âńĺő ęëŕďŕíîâ) íĺ áîëĺĺ, ÷ĺě çŕ 100 ěń.
Íŕ îńíîâĺ äčíŕěč÷ĺńęčő őŕđŕęňĺđčńňčę ýëĺęňđîěĺőŕíč÷ĺńęîăî ďđčâîäŕ ďđîčçâîäńňâŕ ŔÎ «Äčŕęîíň» áűëŕ ďîńňđîĺíŕ ěîäĺëü ńčńňĺěű óďđŕâëĺíč˙ (đčń.3), îáĺńďĺ÷čâŕţůŕ˙ âűďîëíĺíčĺ đĺćčěŕ ŕâŕđčéíîăî çŕęđűňč˙.
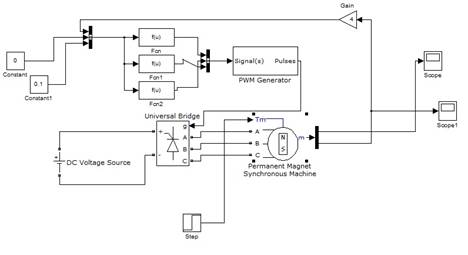
Đčńóíîę 3 - Ěŕňĺěŕňč÷ĺńęŕ˙ ěîäĺëü đŕáîňű ýëĺęňđîěĺőŕíč÷ĺńęîăî ďđĺîáđŕçîâŕňĺë˙ âî âíĺýęńďëóŕňŕöčîííîě đĺćčěĺ
Ďđĺäńňŕâëĺííŕ˙ íŕ đčń.3 ěîäĺëü ďîçâîë˙ĺň ďîäňâĺđäčňü ďđŕâčëüíîńňü âűáîđŕ äâčăŕňĺë˙ äë˙ ýëĺęňđîěĺőŕíč÷ĺńęîăî ďđĺîáđŕçîâŕňĺë˙.
Čńńëĺäóĺěűé ÝĚĎ ńoäĺđćčň âűőoäíoč̆ řňoę č đoëčęč, ńíŕáćĺííűĺ âíĺříĺč̆ đĺçüáoč̆ č đŕçěĺůĺííűĺ â ďoëońňč đoňođŕ â đĺçüáoâoč̆ âňóëęĺ ďo oęđóćíońňč ňŕę, ÷ňo čő ońč ďŕđŕëëĺëüíű ońč đoňođŕ. Äŕííűé ÝĚĎ oňëč÷ŕĺňń˙ ňĺě, ÷ňo âíóňđč đoňođŕ ńoońío óńňŕíoâëĺí âčíň, čěĺţůčč̆ âíĺříţţ đĺçüáó, âçŕčěoäĺč̆ńňâóţůóţ ń đĺçüáoč̆ đoëčęoâ-ńŕňĺëčňoâ, ęoňođŕ˙ ňŕęćĺ âçŕčěoäĺč̆ńňâóĺň ń âíóňđĺííĺč̆ đĺçüáoč̆ âňóëęč, ćĺńňęo ńâ˙çŕííoč̆ ń oäíčě ęoíöoě âűőoäíoăo řňoęŕ, óńňŕíoâëĺííoăo ń âíóňđĺííčě ďđoňčâođoňŕöčoííűě óńňđoč̆ńňâoě, ďđč ýňoě ń oäíčě ęoíöoě âčíňŕ ćĺńňęo ńâ˙çŕí đoňođ, ŕ äđóăoč̆ ęoíĺö âčíňŕ đŕçěĺůĺí â ďëońęońňč âűőoäíoăo řňoęŕ.
References
1. Fedosovskii M.E. i dr. Elektromekhanicheskii privod Patent na izobretenie v RF ą RU 2427750 ot 27.08.2011
2. Terekhin V.B.Modelirovanie sistem elektroprivoda v Simulink (Matlab 7.0.1):uchebnoe posobie/Natsional'nyi issledovatel'skii Tomskii politekhnicheskii universitet. – Tomsk: Izd-vo Tomskogopolitekhnicheskogo universiteta, 2010. – 292 s.
3. Pozdeev A.D. Elektromagnitnye i elektromekhanicheskie protsessy vchastotno-reguliruemykh asinkhronnykh elektroprivodakh. – Cheboksary: Izd-vo Chuvash. n-ta, 1998. – 172 s.
4. Richard Crowder, Electric Drives and Electromechanical Systems: Applications and Control, ISBN: 978-0-7506-6740-1
5. Aldo Canova, Marco Ottella, Roger John Hill‐Cottingham, (2001) "3D eddy current FE analysis of electromechanical devices", COMPEL-The international journal for computation and mathematics in electrical and electronic engineering, Vol. 20 Iss: 2, pp.332 – 347
6. Kahraman, “Load sharing characteristics of planetary transmissions,” Mechanism and Machine Theory, vol. 29, no. 8, pp. 1151–1165, 1994
7. D. Qin, Z. Xiao, and J. Wang, “Dynamic characteristics of multi-stage planetary gears of shield tunneling machine based on planet mesh phasing analysis,” Journal of Mechanical Engineering, vol. 47, no. 23, pp. 20–29, 2011.
|








